Here is the problem, I´m able to arm the motors but when I give ANY throttle, it goes to something close to 50%, is not linear, is like binary (ON / OFF).
It´s very weird, because when I do the ESC calibration once I move throttle down I´m able to control the throttle as expected, so it´s not a radio or wiring issue.
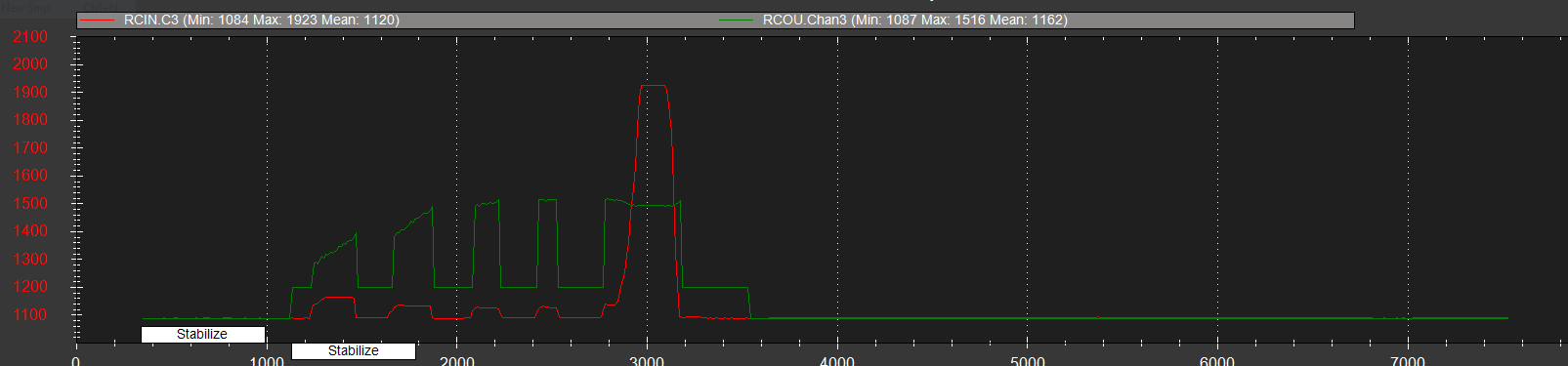
Now I’m not doing full throttle, in fact doesn’t matter how much throttle I give, it always spin on the same speed, like I mentioned is a “binary/digital behavior”
I don’t know what the RCOUT is or how can I set it. Any idea ?
ESCs are calibrated, and like I said, once I finish the calibration reducing the throttle to the minimum, then motors work as expected, if I remove the battery and plug it back, is again behaving on this way.
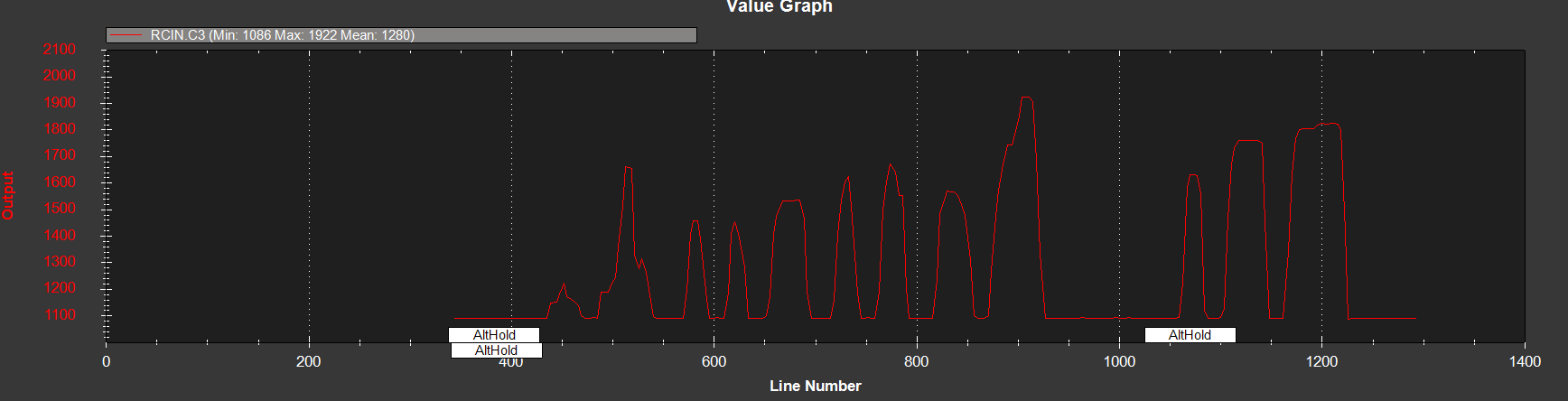
If i check your parameters, then RC3_IN is 1087 and your RC3_MAX is 1922. This is normal and the same for mine. It means that around 1500 is 50% throttle. Most of the peaks in the graph are about 1500.
I´m using channel 5 to move across the flight modes just as a test.
I tested it again using both ACRO and Stabilize and is exactly the same. Motors ARM, but regardless how much throttle I give, it goes to the same RPM no proportional.
Hi Mike, is the parameter LOG_BITMASK responsible for the log level ?
What value would you recommend to put there ?
If this is the value, here are the options I see: 830:Default 894:Default+RCIN 958:Default+IMU 1854:Default+Motors -6146:NearlyAll-AC315 45054:NearlyAll 131071:All+FastATT 262142:All+MotBatt 393214:All+FastIMU 397310:All+FastIMU+PID 655358:All+FullIMU 0:Disabled
Just add all logging. Since you’re still on the bench, it doesn’t matter that the APM is a bit busy with logging.
In the last log you posted, it seems you’re correctly in stabilize mode.
Please have a look and check the video, is exactly what is happening, note that I´m giving very low throttle and motors are not increasing RPM on a linear way, the video clearly demonstrate the problem.
Again:
Radio is properly calibrated.
If I do the ESC calibration then motors work exactly as they were supposed to do, but they it stops working and reverts to the problem once I disconnect the battery and plug it back.
If the log is not yet full, please let me know, I´m quite new on APM board so I not very familiar, but the log bitmap is set to 655358.
Only for a short period of time at the end of the “flight” I give full throttle.
As you can see regardless how much throttle I give in the controller the motors are going to about 1500, I used throttle 5 times in this log, most times below 1200, and only the last time full (1900/2000) and it doesn´t change the fact that motors are going to the about 1500.
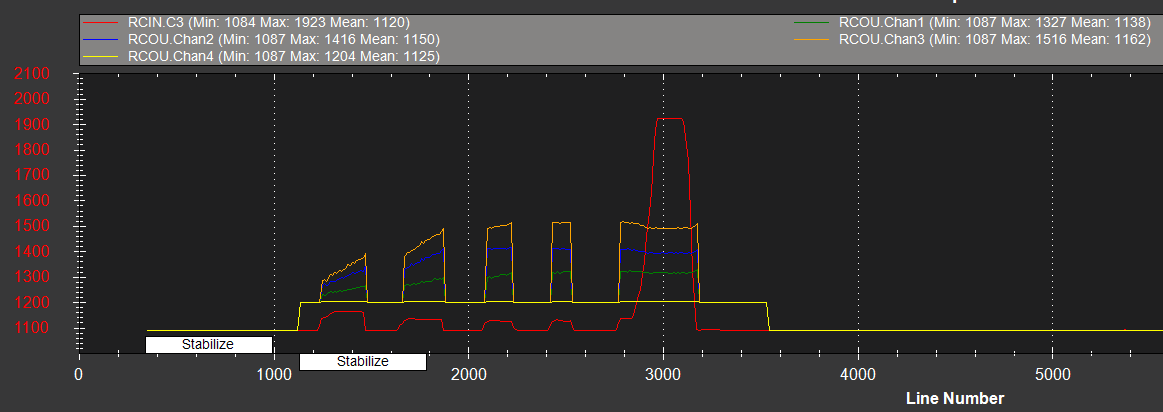
If i look at your output, it seems that one motor is NOT spinning up while the others are spinning more. It looks like the drone is trying to correct some inbalance.