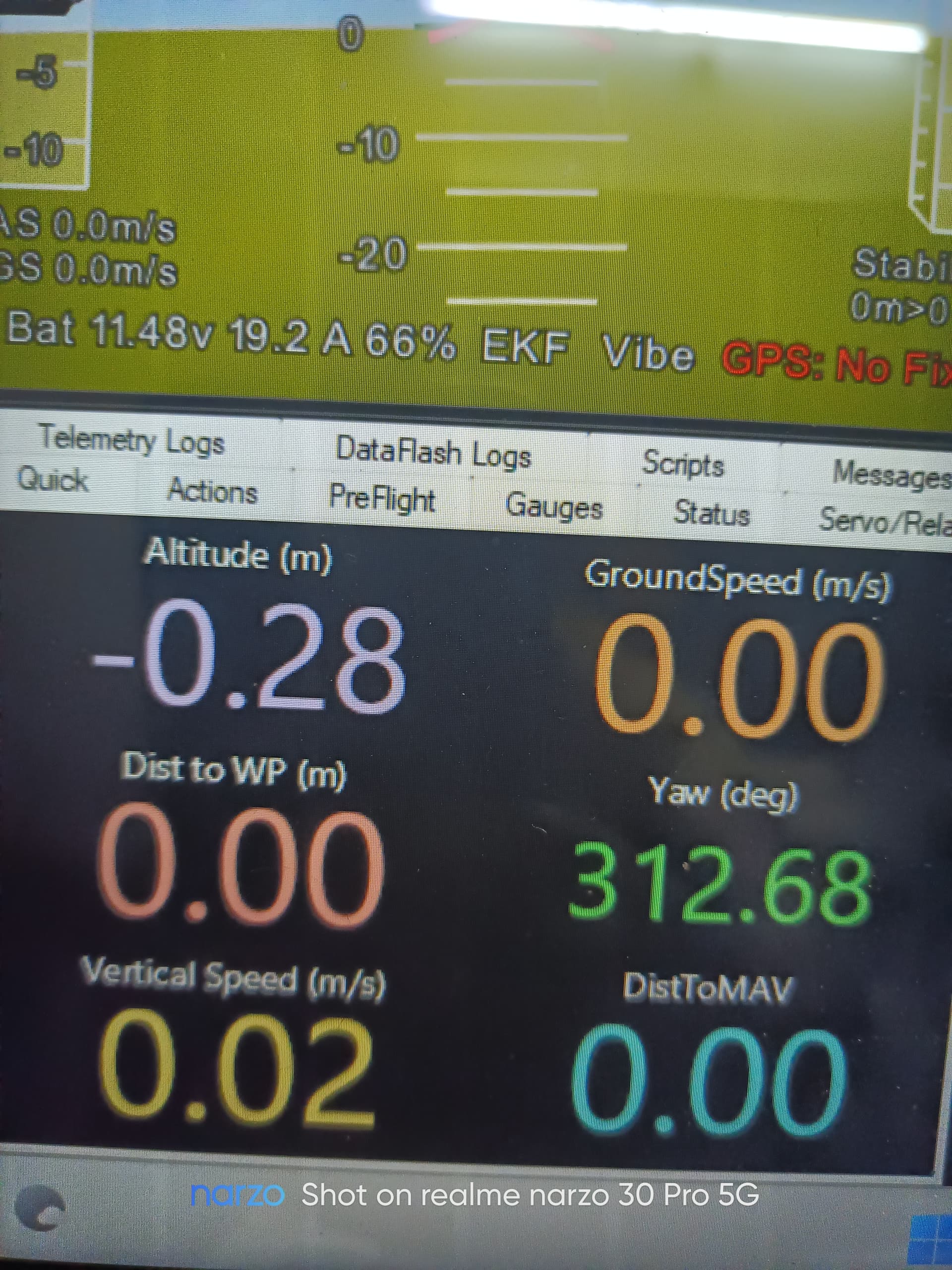
Hello. Actually I am facing a problem from past 1 month and I now need the solution for it! I am facing an apm 2.8 barometer error, that is, when I arm my Apm 2.8 which has firmware 3.2.1 , The barometer is automatically calibrated to 0 Metres and then it starts showing negative altitude. Like -0.5 to -10Metres. I opened up my apm 2.8 and found that there was no foam covering over barometer, so I sandwiched a black foam between the inside of apm and over barometer. Still it is showing negative values. My Quadcopter is not arming because of it. What should I do now?? Anybody who knows the solution?
Replace it with a Flight Controller supported by current Ardupilot. The APM has been obsolete for many years.
But, doubt it’s not arming because of that. However “GPS:No Fix” will certainly do it.
2 Likes
Actually, it’s even not arming in stabilize mode, error is due to negative altitude.
Fine, can you give some examples of those latest flight controllers? However, those flight controllers are quite expensive. Here in India, Pixhawk 2.4.8 costs 12000 INR. Which is a huge amount to spend on one flight controller…
2 Likes
Altitude gets reseted as soon as you arm. That is not the case for refusing arming. Something else is wrong.
But you should really get a cheap STM32 F7 Flight controller.
1 Like
Means, You think that my apm 2.8 FC is dead! But It was flying like a dream just few weeks before! The problem came up suddenly and what should I do now?
Should I go with a new Pixhawk 4 flight controller(which would be quite expensive and I will have to save earnings for nearly 5 months!) or is there any way to repair this apm 2.8?
There are few people.who know APM 2.x and even fewer willing to work with it.
If you are using APM 2.8 it is likely that even the cheapest F7 flight controller will be enough to meet the requirements.
But to change a flight controller, I will have to modify the Quadrotor as well. And, this is my 2nd Apm 2.8. the first one also had the same problem, So I bought a new apm 2.8 due to lack of knowledge. I am now facing same problem.
Isn’t there anybody who knows how can I fix that rubbish barometer!?
Are you even sure the barometer is causing the issue? 0.28m drift on the ground is nothing out of ordinary, well within expected drift of an non stabilized barometer.
1 Like
Yes. I am 100% sure that barometer is only causing the problem. Just 1 week before, my drone was flying well. It’s barometer also showed nicely perfect readings. Just suddenly I noticed that it is showing -0.75 Metres when placed 1.5M above the ground. When I placed my drone in ground, it’s readings were -2.25 Metres approx. When there is a negative altitude, my drone never arms. But as soon as there are positive values(when placed at some height) the drone arms.
If the FC shows -0.75m on real 1.5m above ground and than -2.25m if placed on ground shows me that in principle the FC and barometer is working correct. Only the initial setting / calibration of the barometer is wrong.
How you are 100% sure that the barometer is the only reason On your picture above also “No GPS fix” is shown, which also can be a reason.
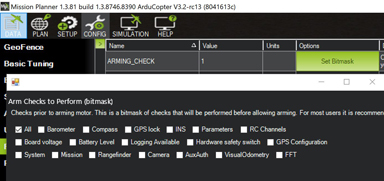
Can you select the parameters needed for arming?
1 Like
Oh Ho! I am inside my house and taking this picture. Inside my house, How will my M7N GPS fetch the signal!? And also, I am in stabilize mode. In stabilize mode, there’s no need of GPS 3D Fix! How can I now calibrate this stupid barometer!?
You can not calibrate it. And it does not need calibration.
Find the real problem, this is not the real problem
Those have been discontinued. You don’t need to select a PIxhawk anything, there are plenty of other lower cost options in the link I provided.
1 Like
You can. Not all selections will be valid obviously with that old firmware. Blew the dust off an old APM based quad I still have. It’s on 3.2-rc13 as shown because the USB port is damaged and can’t be updated but its the same as the 3.2.1 version (last supported) he is running.
BTW-The messages screen in the latest versions of Mission Planner shows almost nothing for this version of firmware so it’s useless for troubleshooting.
Yes. I had a look on many of them. But low price means low quality sensors and thus, lower flight stability. Actually, Now I only have two ways:
-
To buy a new And advance and expensive flight controller(Pixhawk 4 or 6C) because I am quiet tired now by problem solving. I made this drone 4 years ago! And it’s only 4~5 months, it flew quite stable. Years went in vain in problem solving…
-
If Anyone of you people can tell me what to do with that rubbish barometer of my apm 2.8…
=> I can buy a discontinued Pixhawk 4 by giving an order form to Holybro and paying in EMI…
Because, the thing which costs just 400$ in US, has its value more than 32000 INR !!! In India…
Overall, please try to help me in this disgusting problem… Or I should buy a new Pixhawk and end the discussion here…![]()
![]()
![]()
You should buy a new supported Matek or Holybro flight controller. There are cheaper options; Speedybee, Mamba, Skystars, Omnibus, some others. The cheapest will have F4 processors, which are feature limited but will leave that old APM in the dust.
2 Likes
You don’t need to spend 400$. Search for “Matek H743 Slim” on Google, they are sold starting at 60$ (on AliExpress) and they are very capable FCs.
F4 FCs are a bit cheaper, starting at 40$, but they also don’t support Lua scripting, if you want that option in the future.
1 Like
If anyone pays $400 for a discontinued Pixhawk 4, they are a fool. You can get a Pixhawk 6C or better for $200 directly from Holybro.
I understand location plays a part in pricing and availability. But a $100-$200 US budget should be plenty for a supported F7-H7 autopilot.
1 Like
Move beyond the 4th stage of grief and budget for a supported Flight Controller that isn’t named “Pixhawk”.
1 Like