Happy new year and a big thanks to all developers for Arducopter 4.0!
@rmackay9 Question, where can I find further information on the Bendy Ruler interface?
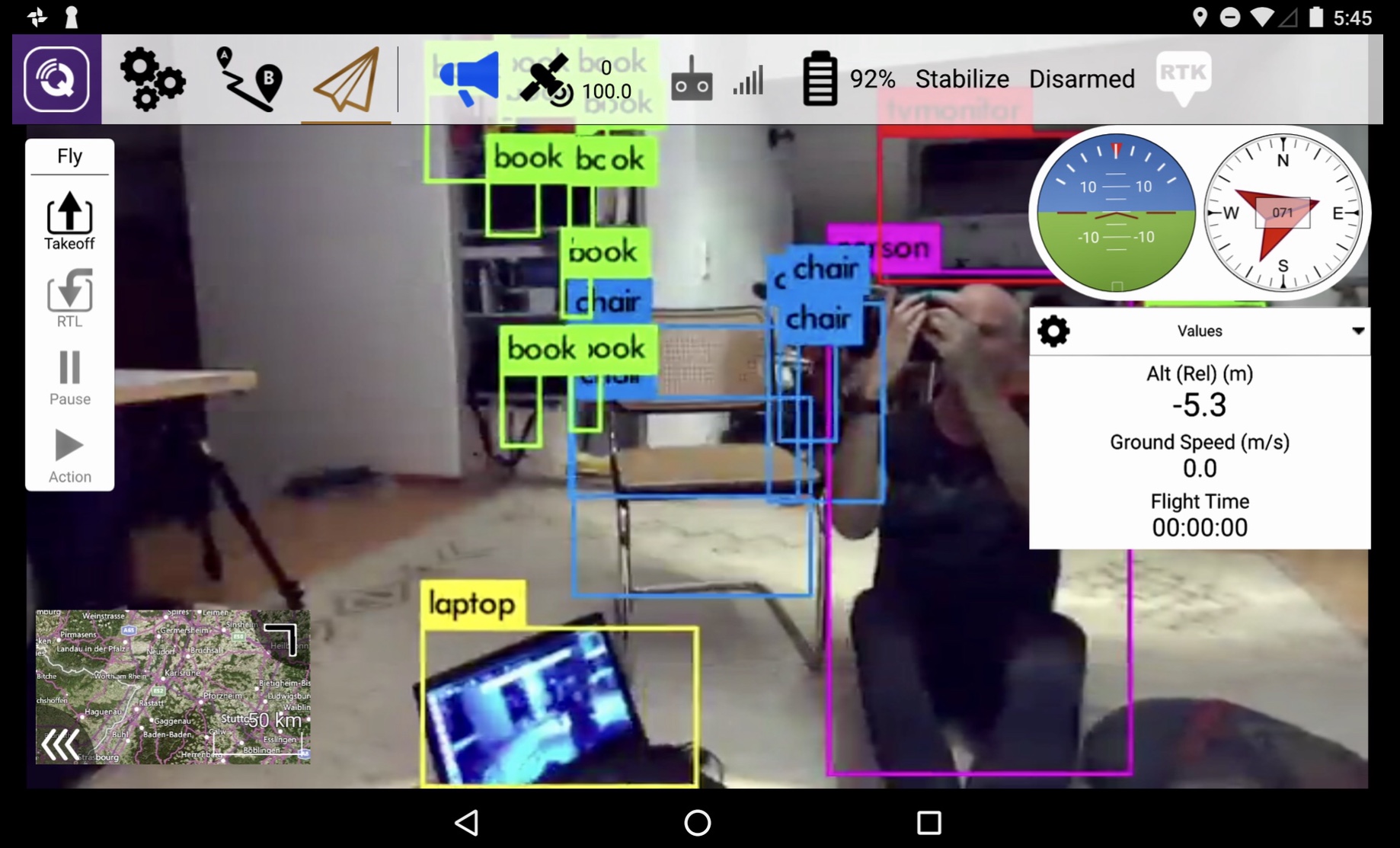
I am running different DNNs for visual depth estimation (resnet18) and object recognition (yolo v3) on a TX2 companion computer and would like to feed the data into the new obstacle avoidance services.
Thanks!
3 Likes
At the moment, the only way to get the object information into AP is to send an obstacle distance mavlink message and then if the PRX_TYPE = 2 (for Mavlink).
This should mostly work but it means we lose some information because there is no way to pass in the vertical position (lidar distances are also assumed to be level with the body of the vehicle) and you also can’t specify an object id so bendyruler’s object database wouldn’t know to replace an existing object in the database if it’s sent in more than once (it will expire the object after a few seconds though).
I think we could make a different interface…