It is plug and play assuming you follow the steps to enable UAVCAN.
No, our products are made and sold from the USA.
The DPS310 is not new and we have switched to is on all of our newer products. It’s specifications are better than the older MS5611 and it is not sensitive to light. It works very well.
One note, I believe only the LED and Compass are supported in the older 3.6.11 Arducopter. You’ll need 4+ to take advantage of the Baro and safety button.
It is ok to use only led and compass. I think it should work plug and play because i already use a UAVCAN compass inside the zubaxx uavcan gps.
If i order from your site is there a way to have it shipped with ups, fedex or similar?
Please confirm you have the board in stock so i can order it.
Hello, you have done a very good choice with kitcan…with the new rm3100 you will fly as a sharm…ive tested a rm3100 and you will have awesom results, plus the baro on the board you will have a precise measurement…Mro know how make better all of that
Judging by the commentary on the product page, it isn’t immediately clear whether the KitCAN supports a variety of airspeed sensors, or if it is hard-coded to the MS5525.
The following implies that only the MS5525 is supported: " . . . supports all legacy uBlox GPS sensors and a firmware that supports our MS5525 Airspeed Sensor (via I2C)."
The following instead implies that multiple sensor types are supported, by inclusion of the ARSP_TYPE parameter:
Then access your KitCAN parameters this way via mission planner:
Mission Planner->Initial Setup->Optional Hardware->UAVCAN-> SLCan Mode CAN1 (or 2) -> Parameters
1 min later inside the CAN Parameters change the following:
ARSP_TYPE -> 4
ARSP_USE -> 1
ARSP_BUS -> 0
I’d like to know as I prefer the SDP33 or DLVR on my builds, and it would be a great feature to allow installation of these particular sensors at a distance.
This device runs Ardupilot supported AP_Periph, so any devices supported by the parent project can be supported by the CANNode. Our tutorial relates to a popular product we sell.
Complex answer is
On this board we expose a UART and I2C bus as well for optional devices. So you could also connect a GPS+MAG or i2c airspeed sensor as suggested.
If you have a look at the current airspeed driver, that value can be any on the I2C airspeed sensors:
One item of note, the DPS310 baro uses I2C device id 0x77, which is also one of the values that the MS5525 can be set to. So you would need to make sure that any I2C devices use a WHOAMI value other than 0x77.
I hope this answers your question, if not let me know.
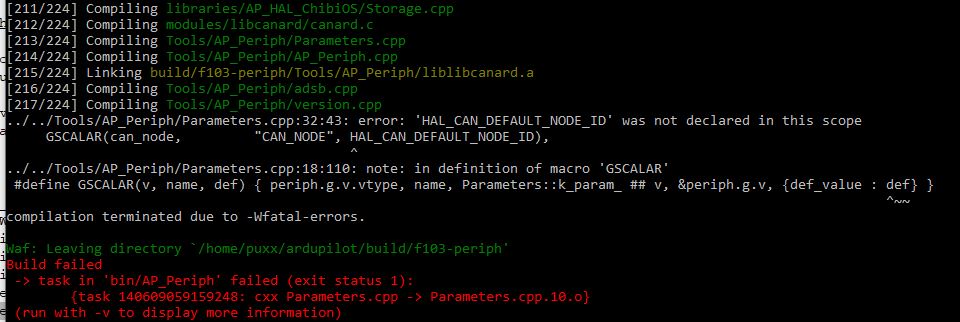
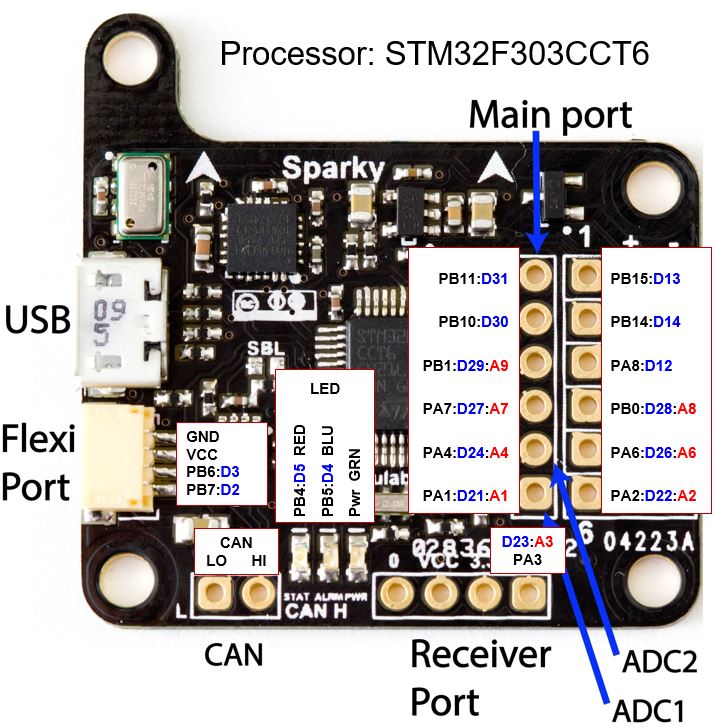
So far so good with AP_Periph nodes via Arduino IDE. I have a couple of Sparky V1 F3’s (https://github.com/geosmall/Sparky_FCs_for_Arduino_Core_STM32) I am working toward converting to AP_Periph nodes. The Tau Labs folks were ahead of their time, their Sparky boards are ideal with already built-in CAN transceivers. See CAN pins below:
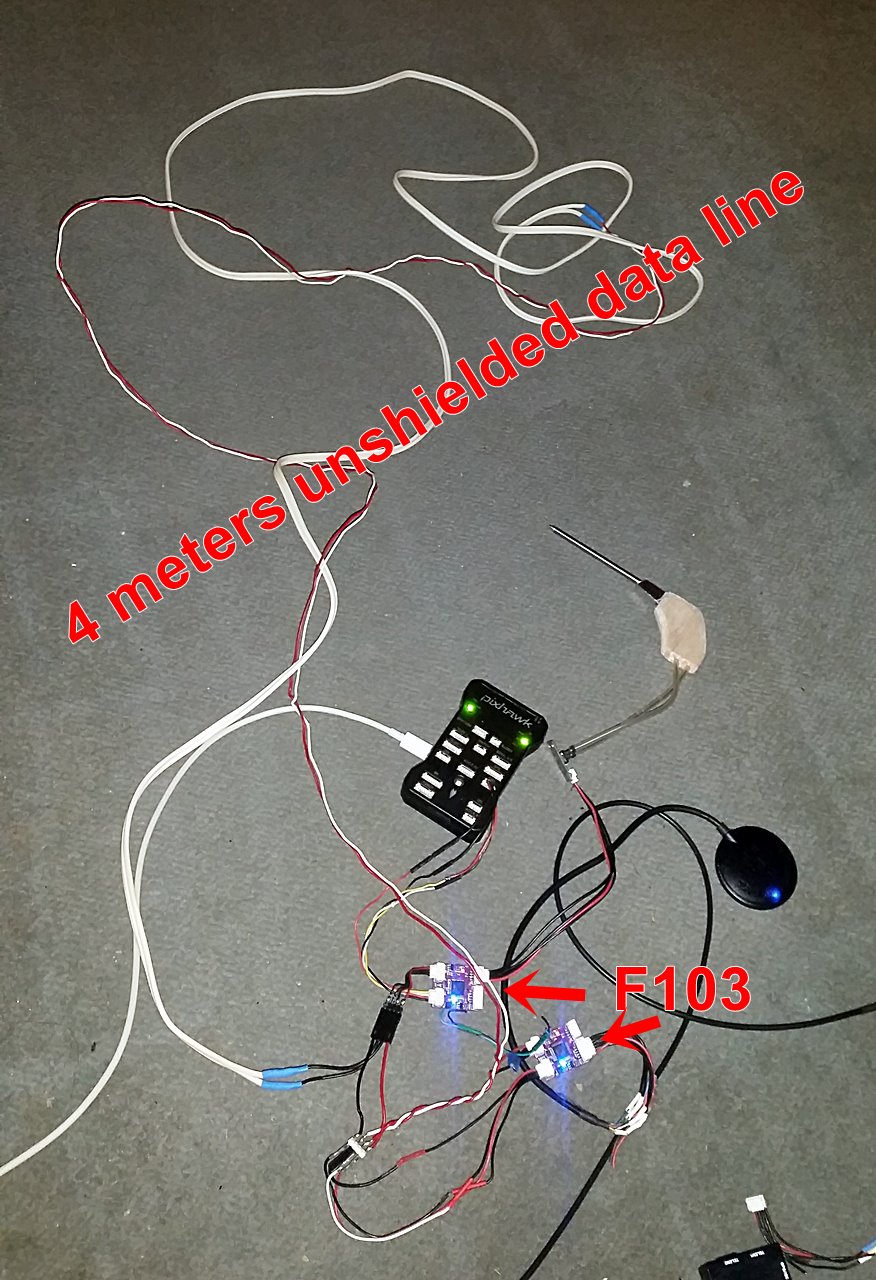
Between Pixhawk and mRo 103 nodes there are 4 meters of unshielded speaker cable respectively wire used for a doorbell (CANBUS high + low).
This distance would be impossible with an unshielded I2C bus. With Tridge’s AP_Periph Firmware, CAN BUS and two mRo 103 nodes the connection works fine without any disturbances and only 4 wires between Pixhawk and GPS (including NTRIP data upstream !), compass and airspeed sensor.
Does the f103 have enough power to control ESCs and / or servos too ?
Depends how it is controlling them. If it is just outputting PWM or DShot then yes, I’d expect it would have no trouble, but I’d far prefer to use the f303, especially for DShot, as the DMA on the f103 is a pain.