The warnings you show in the screen shot are just warnings, and don’t prevent the build from working. The error is likely off the top of the screen (waf does parallel builds, which means things can keep going for a bit after an error)
I haven’t actually tested an AP_Periph build on cygwin before, and now that I try it I see it does fail. The error is:
my guess is you are getting the same error.
The problem is caused by cygwin not having a “python3” alias for a python 3.x version. In my case I have python3.7 installed.
If you also have python3.7 installed, then you can fix it like this:
ln -s /usr/bin/python3.7 /usr/bin/python3
you may also need this:
python -m pip install serial
then you should find the build works (or at least it does for me on cygwin)
Cheers, Tridge
Thank you so much. You are absolutely right. There was a lack of a reference to “python3” alias . And all the recommendations on the official site say that there should be a reference only to "python"alias.
So when I write
ln -s /usr/bin/python3.7 /usr/bin/python3
it build fine!!!)
Apologies if this is a repeat question or if this isn’t the right place to ask this. I was wondering if there is currently support for UAVCAN servos (command and receiving feedback data) in Ardupilot? Is there an AP_Periph node currently for UAVCAN esc messages and actuator (servo) messages? I saw the support on the Ardupilot website for UAVCAN ESCs - is there an AP_Periph node available for ESCs?
hello, as I’ve redesign a node adding the stm32f303cct6, i would like build the bootloader and the firmware for it, ive read it’s necessary hwfile.dat, but after this what’s necessary for build the bootloader and firmware…,
Then build the bootloader using the ./Tools/scripts/build_bootloaders.py {BOARDNAME}
Using my example: ./Tools/scripts/build_bootloaders.py f303-M10070
The script will copy the built bootloader to the correct folder (Tools/bootloaders/). When you build your main firmware, that bootloader will be embedded so that the bootloader can be flashed using the AP_Periph parameter FLASH_BOOTLOADER = 1. You can also flash the bootloader manually to your new board with JTAG.
Good day Phil, thank you for the info you gave me…, i will follow your instructions.
I will check first if the pinout for the node I’ve done is correct.
Good day Phil, i’ve try follow your instructions… but after ive give the command for build ./Tools/scripts/build_bootloaders.py f303-10057, nothing happen
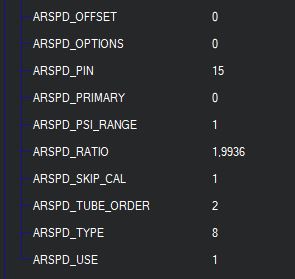
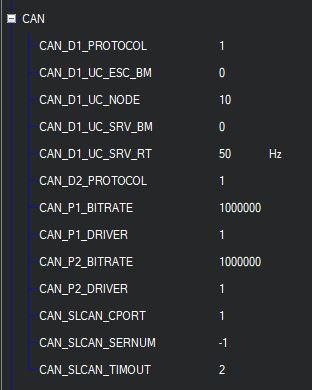
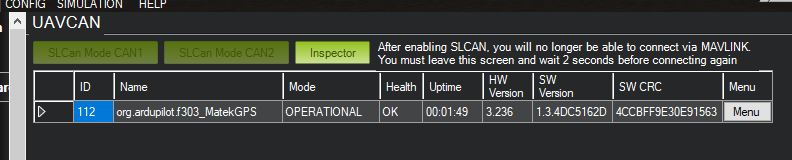
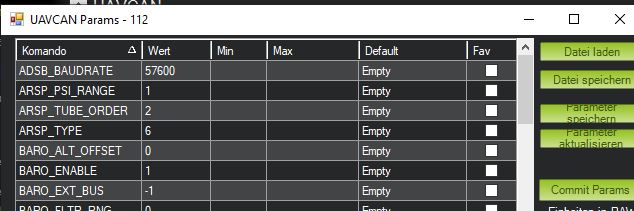
Does anyone have the SDP33 airspeed sensor running on the Matek M8Q-CAN board ? I can’t get the SDP33 sensor to work on the M8Q-CAN.
The built-in GPS, barometer and the compass work fine, only the SDP33 is not recognized. To exclude a defective SDP33, I had it running on the I2C input of the Pixhawk without problems. I had also changed the connection cables to be on the safe side.
Neither the installation of AP_Periph V1.2beta2 nor a daily-build from 2020-12-19-15:12 changed anything.
Here are the settings:
FC Pixhawk 1 (2MB) Arduplane V4.0.7.
yes, a lot of the AP_Periph builds do that, for example GPS, baro, mag
yes, we already have build targets for quite a few boards that normally run a full flight stack (eg. CubeBlack, Pixracer, CubeOrange). Adding more is easy