I did some testflights, nothing spectacular … first without payload, second and third with camera …
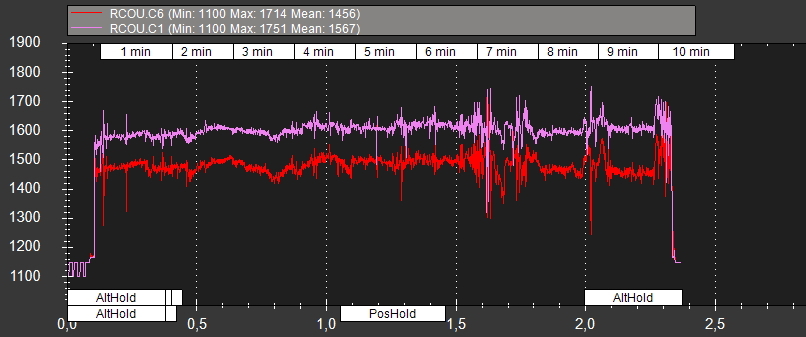
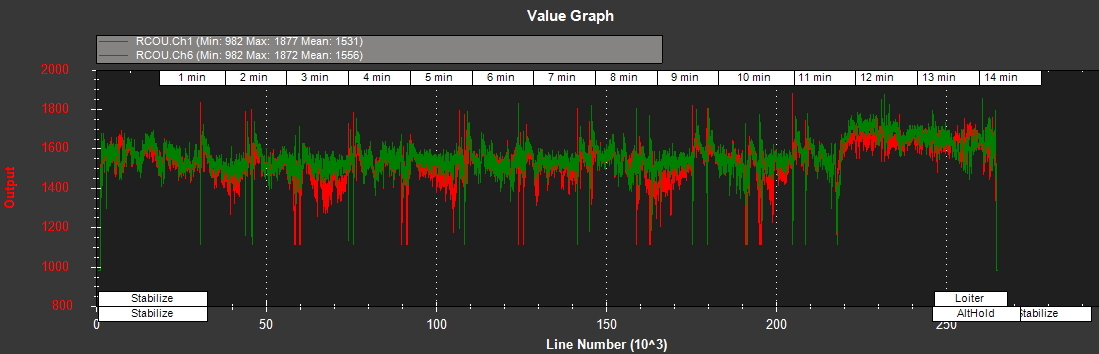
Looks pretty stable. Taking off in alt hold is much smoother than with groun oscillations in stabilize mode.
I’m too new in PH to be good at analyzing logs … Auto analysis shows motor warning due to setpoint difference.
I am flying this rig with special firmware from HERKULES (bottom motors +10% for X8 config).
Would anyone like to have a look inside and give some more suggestions OR TASKS ?!
I could do anything You want me to … to gather mor information on PH2 with big machines …
Interested in your bottom motor change. Do you mean ESC firmware?
And what +10 value?
Have often wondered about putting 15s on the bottom of my bird, but have read so much conflicting information that mine are just flying equal
It’s 10 % more power to the bottom … by adjusted fw. with Herkules III okto XL powerboard.
For the moment I sent log data to manufacturer to let him check the values.
Setup is KDE 5215 with KDE triple blade adapter and DJI 17" carbon blades (maybe too small), Herkules III Okto XL, 2x SLS 12000mAh on Devourer 130, TOW 11,7 kg
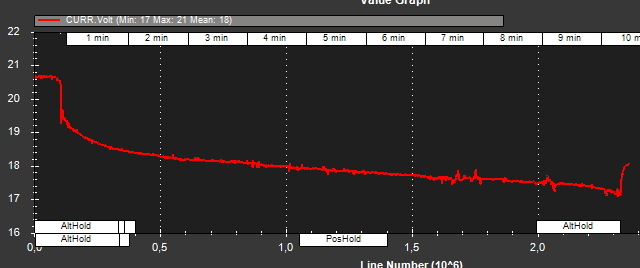
Now I see Your point … I think here we can both learn something … I do not run my batteries throught the pixhawk due to battery telemetry via herkules III board … but for some reason the PH shows an irritating, nonexisting voltage … Of course I’m running on 6s and the values You interpreted are far from reality … If I would have to look at these graphs I’d go ooooops ;-)))
I would agree - stability seems impressive - although I suspect it gets a bit easier with more weight as the inertia of the large mass prevents it from being pushed around easily (on a calm day).
Emin - you can get the PID settings from the initial section of the log file…
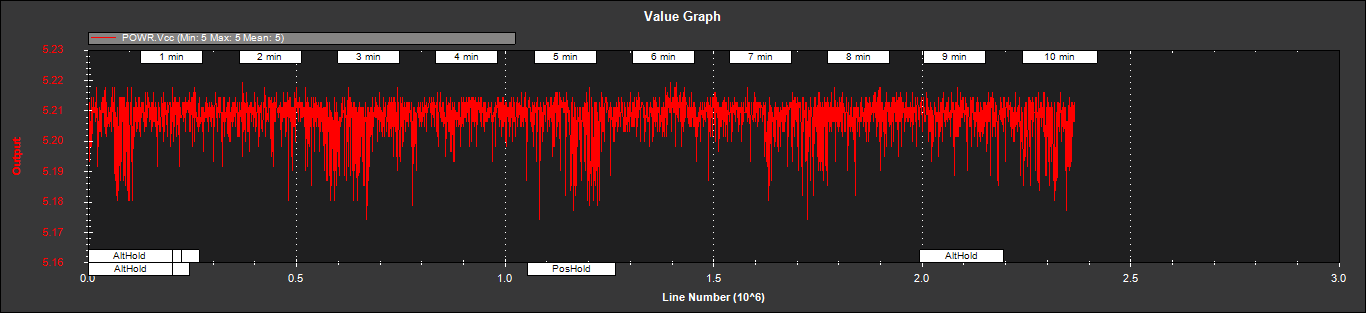
So this is what your voltages actually looks like. I had the scale wrong .
Still acceptable . I made an LC filter to remove the noise from my supply.
Supply operates at 380 khz. So the LC filter I used 10 uH inductor with 2X 22uf multilayer ceramic capacitors.
it is amazing how "dirty " switching supplies voltages are.
 and the values You interpreted are far from reality … If I would have to look at these graphs I’d go ooooops ;-)))
and the values You interpreted are far from reality … If I would have to look at these graphs I’d go ooooops ;-)))