I am helping a friend set up Matek F-765 wing on his T-28 Trojan. He is a Spectrum radio user and I am not.
Apparently, Spectrum uses DSM2 and DSMX communication protocols. Should I wire and set parameters for the receiver the same as SBUS?
Also, Spectrum has what is known as satellite receivers can I only use satellite receivers plugged directly into FC?
This is just a telemetry module. It won’t do anything for you.
This is a good old fashion RC plane receiver. Good receiver, works well. But no digital output so useless for ArduPlane on the Matek board unless you get a PWM to PPM converter. Those used to be more common and you could probably find one online easy enough, but for the time and money it’s better to get a digital receiver.
---- Oh wait, I take back the part about old fashion. I just noticed that’s an AS3X receiver. I would recommend against using any AS3X or SAFE receivers on an ArduPlane build unless you turn off all the AS3X/SAFE features and render it as a normal receiver. Having two stabilizers is going to cause issues. Again, better off to just buy a new RX.
I’ve used SPM4648 on older ArduPilot controllers. They are simple enough but you need to be careful about the 3.3V issue.
I’ve used SPM4650 on BetaFlight builds. They work good, and they are supposed to work with ArduPilot but there has been some talk around here of issues with SRXL2.
I haven’t had any issues with the SPM46xx receivers but I would be really cautious with the range. Great for around the field but I wouldn’t be going exploring with these ones.
@Allister, Thanks for all the tips. I am not finding any pinout on the board that would provide 3.3V to the Rx. Does F765 have a spaciel UART for Spectrum likePixhawk? UART 6 which I generally use with FrSky receiver is 5V at that pinout.
We are planning to use DSMX Remote Receiver (satellite) for now.
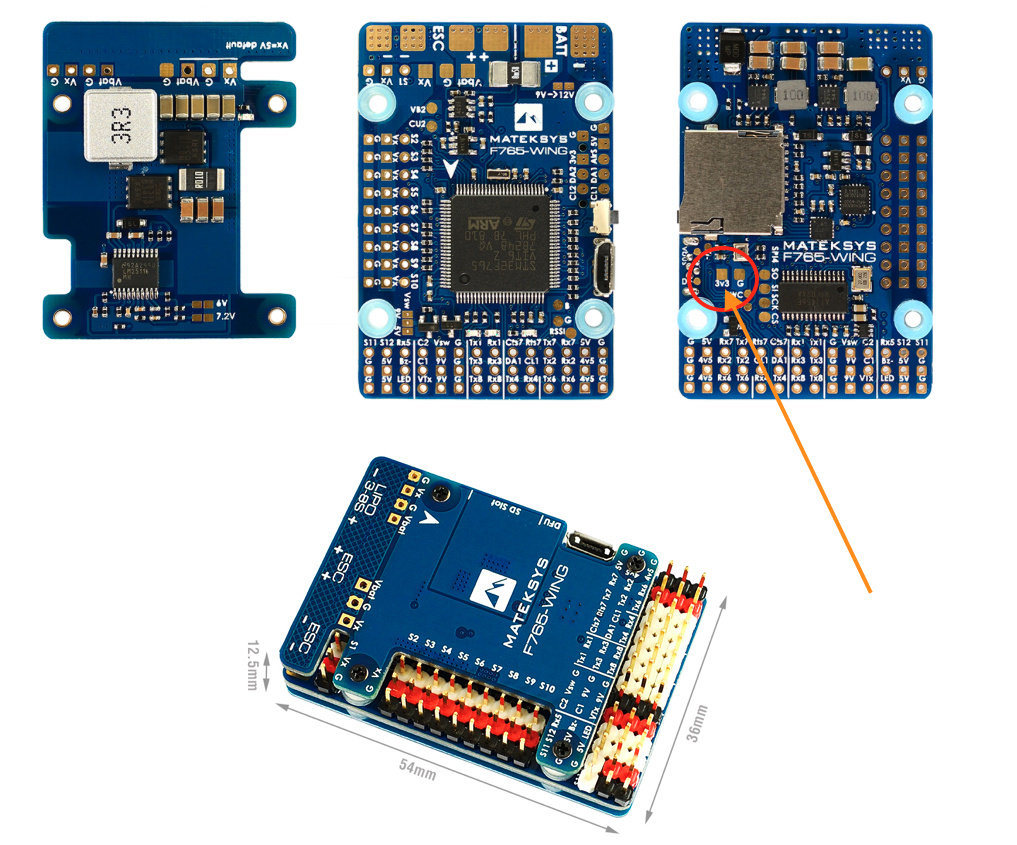
I don’t recall any of the Matek boards having dedicated Spektrum inputs. Matek does say that RX6 should take a DSM input. The 3.3v pad is shown below (doesn’t look very convenient):
@Allister, we bought SRXL2 receiver and plug it into Matek f765 FC at UART6. I tried one at a time both,Serial6 and Serial4 settings as described on the Ardupilot page:
Serial4_Protocol = 23
Serial4_option = 4
RSSI_Type = 3
and for serial6 = 23, 12, 3
I got nothing on the servo output.
I also tried Serial7 by enabling BRD_ALT_Config.
Attached is the parameter file. T-28 parameters.param (20.8 KB)
The receiver is bound and happy but no response from the FC.
I use spectrum with matek and pixhawk 4, both work straight up. With your 765 the manual says serial 6 is for dsm, and remember, it’s the spectrum satellite that is 3.3v so if you’re direct connecting a spectrum satellite use 3.3 but if you’re using a full spectrum receiver on ppm etc then use 5v.
For direct satellite connection make sure to use the normal 3 wire satellite receivers (dsm2 or dsmx) but not the new 4 wire SRXL2 satellite rx’s they use a different protocol and won’t work.
Also I have not had any success using a flight controller to get the satellite into bind mode, so I just use a real rx for bind and after that just connect satellite to flight controller and it works. No serial setup was required from memory
Satellite will only go into bind mode if the 3.3v line can be pulled low in software - most can’t
SRXL2 receivers will go into bind mode no problem as its a software only process
I’m having the same issue with an SPM4651T which will run 3.3 to 8.5v on an F405 Wing running 4.0.9. I’ve tried just about every uart combination I can think of with a bound receiver. No rc input. Unable to calibrate controller of course. I tried the board config 1 thing as well with RX2. I’ve spent hours on it and I’m stumped. It was easy with the same rx on a F411 WSE in INav. TX2 4.5V Gnd and then move the slider to serial rx. I’m stumped.
Thank you! I was able to use plane 4.1 and Serial 6 to get the receiver communicating with the FC. Are there any reasons you can think of not to run the serial receiver on this UART? Unfortunately I also lawn darted my airplane at 80+ mph. Switched from testing RTL (worked great) to manual mode and lost the rc link somehow. I only dropped 28 frames on the whole flight with no holds and signal strength was in the 90’s when it locked up. Most components are salvageable. I have to say, the Volantex Ranger 2000 is the toughest airplane I’ve ever owned. I’ll start a new thread if I need to. Just curious.
Hi Guys,
I have a Phoenix 2600 glider on Spektrum DX7 Gen2 + AR8000 receiver. I’m planninh to make a step forward to FPV. My plan is to setup a DJI Air Unit / Caddx Vista, DJI Goggles and a Mateksys F765-WSE + GPS module, so I can show telemetry OSD. I just don’t know how to put all this together. I was wondering if is possible to install a Crossfire too.
If you could bring me to light, i’ll be very glad.
Best regards!
Definitely cross fire Rx would be a better choice. I gave up on Spectrum/Futaba and other Tx once got into FPV.
If you want OSD on goggles or screen, make sure to wire up Caddx Vista into your FC and change OSD parameters. It is well documented on the Ardupilot document pages.