Hi guys!
Here I am, looking for some help to solve a little issue I have: the tracker does a pretty good job aiming to the plane, but the yaw servo does not immediately return when it reaches the end of travel.
This is the behaviour: I fly my plane in loiter mode, being me and my tracker in the center of the loiter circle. When the yaw servo gets to its limit, let’s imagine it reaches the limit at 0 degrees, it stops there until the plane gets 180 degrees, then it quickly returns to aim the plane, but by that time it already loosed more than half of the tracking. The behaviour is the same clockwise or counter-clockwise.
For what I read in this forum, it is important the hardware used and the tracker design, so I’ll start describing my tracker.

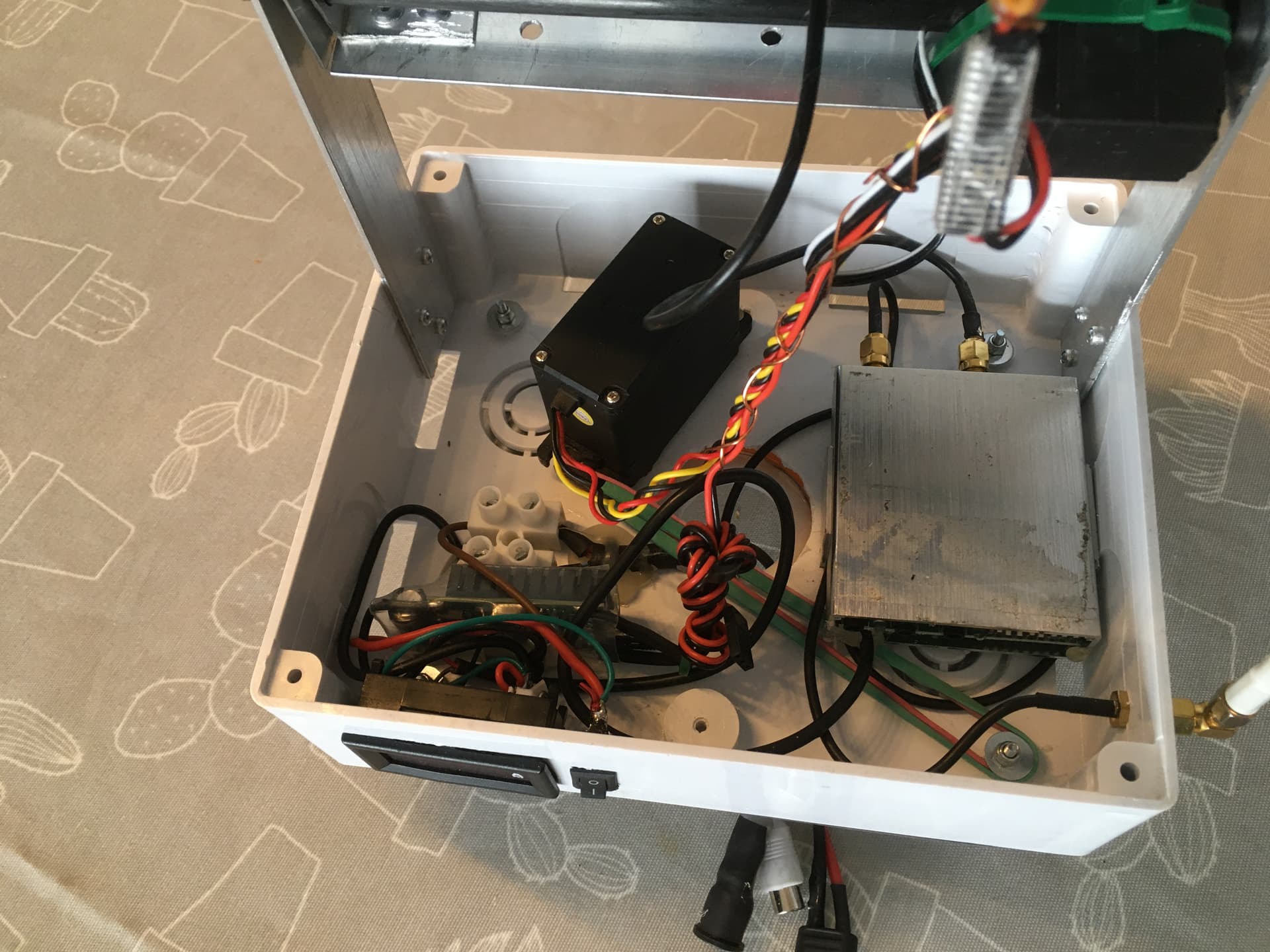
The Yaw part is a home made design using a plastic box, attached to a rotating platform.
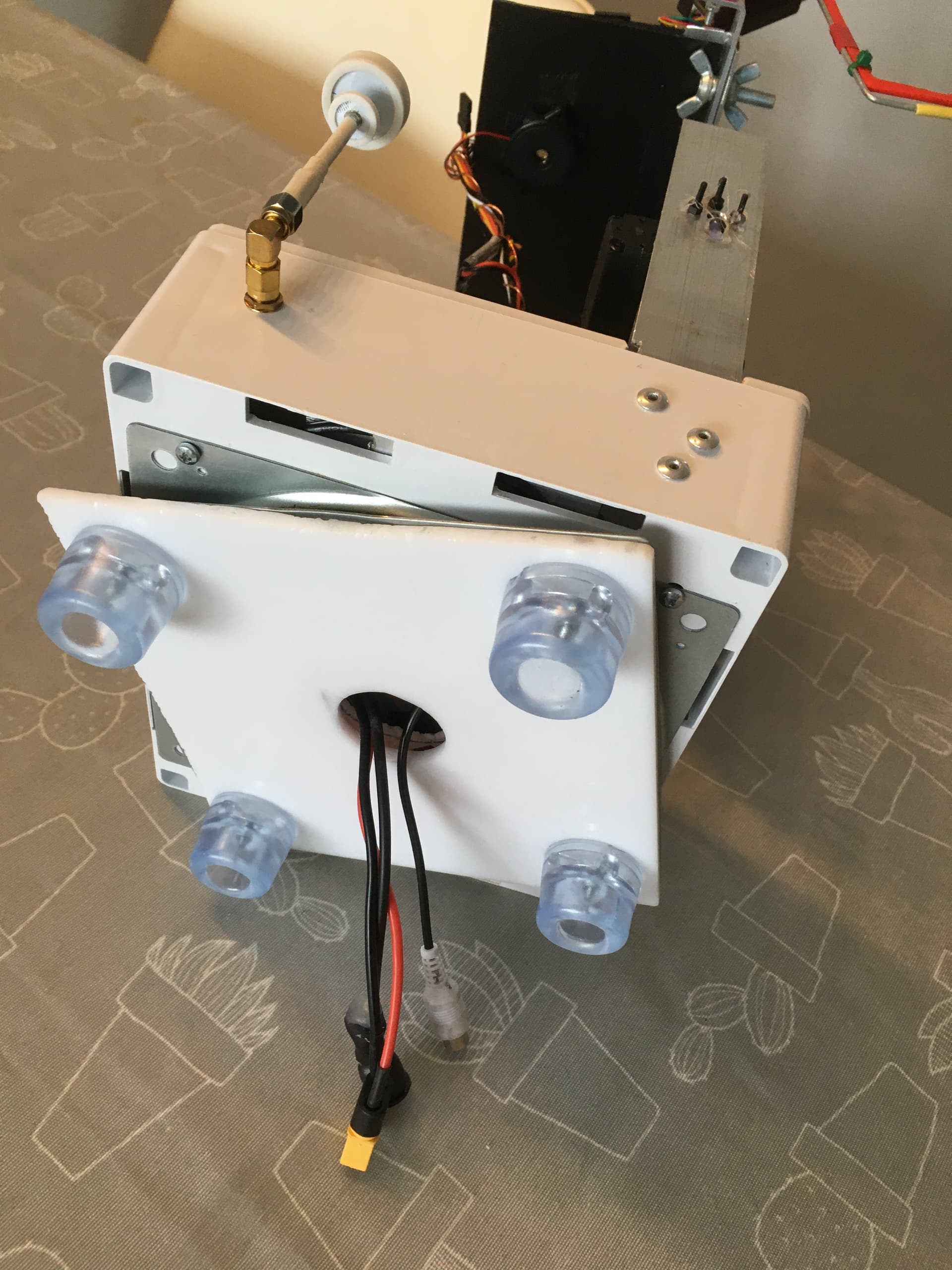
The box contains a HITEC HS-785HB, a position multi-turn servo engaged to a 3D printed gear box in the base platform, to translate the original 3,5 turns into 360 degrees. The box also contains a Volt meter, a 5V BEC and a 5.8. diversity receiver. From a hole in the base exits three cables: 12V input, video output and the FPV google’s Vc connector.
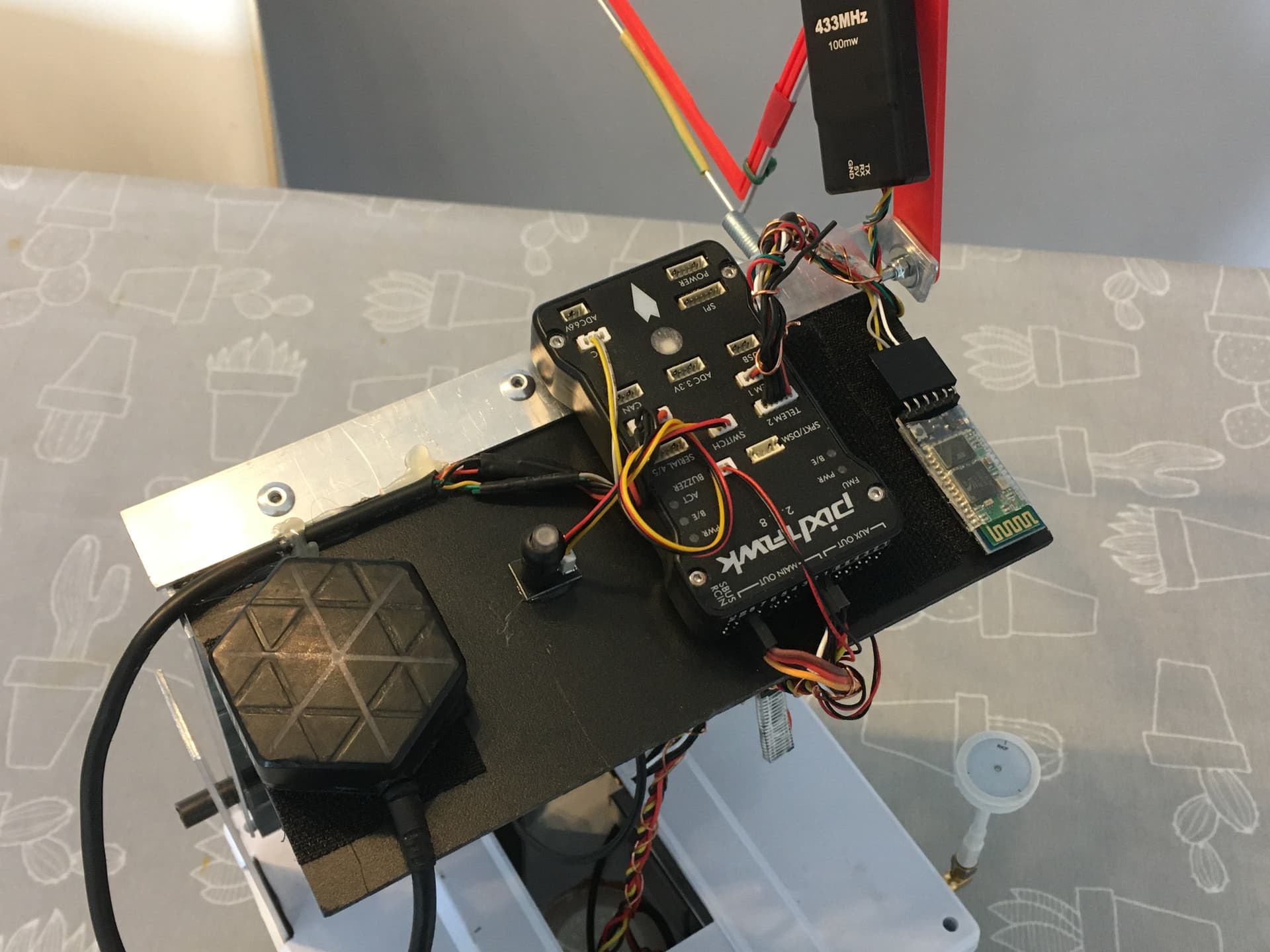
The Tilt part is made from aluminum strips.It is a very basic structure where the rest of the components are located: Standard 90 degree position servo, a patch antena for video, a Moxon antena for the 433 telemetry (SiK radio), Pixhawk, Radiolink SE100 external GPS & compass and a bluetooth module to connect to my Ground Station.
Flight Controller board, GPS/Compass, antennas… everything is pointing in the same direction, so no need to ammend the board or compass orientation.
Flight controller is running firmware stable-1.1.0, but I also tried with version 1.2.0-dev and the problem exists as well.
Parameters:
gwking.param (8.5 KB)
Any ideas? Did anyone experience this before?
Thank you all for your support!
Regards,
George.