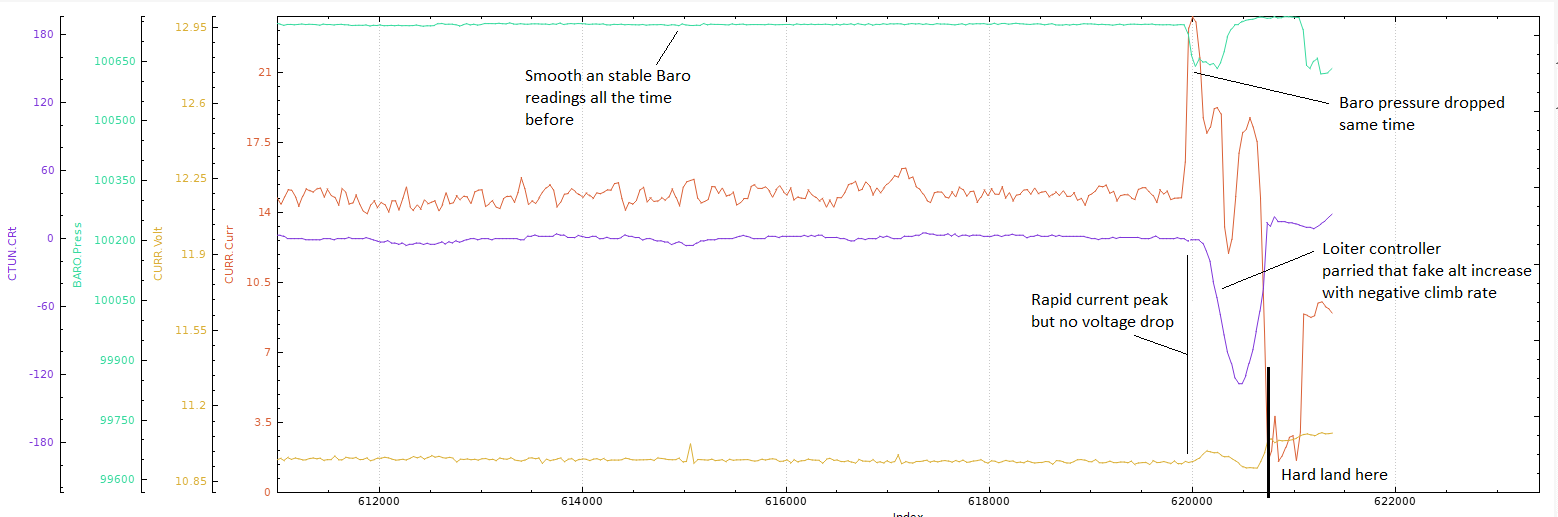
yesterday I had an incident flying my copter: hovering in Loiter at about 1 meter it descended quickly and hit ground.
After log investigation I found the reason of that drop: barometer wrongly reported that the altitude increased rapidly, so the Loiter controller parried this with a descend.
There was no any altitude change. Copter was in several meters from me and hovered very stable. AccelZ values also does not show any moving.
It was almost 30-minutes flight and inspecting baro readings of whole flight I see very smooth and adequate baro values. Exept the one in the end of the flight that caused the hit.
So I attempted to figure out what affected Baro. And I found another anomaly in my log right at the same time - there is a rapid peak of current up to 23A logged. I believe this peak is not real because there is no voltage drop as it usually happens:
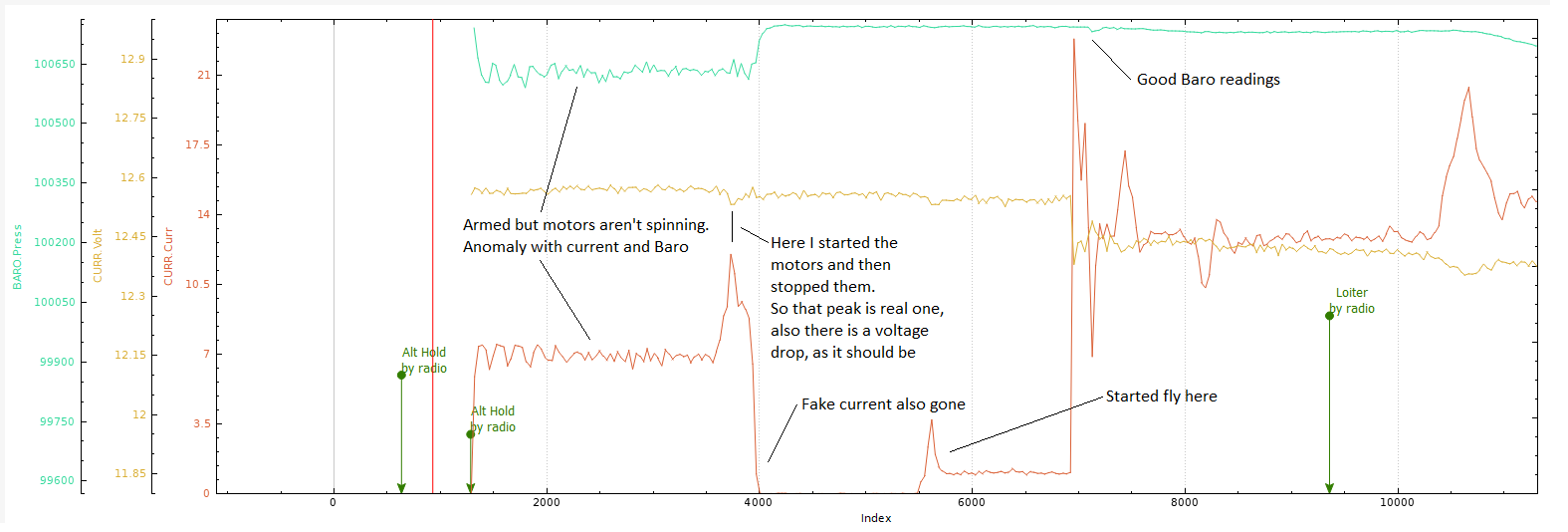
Moreover, I recall that when I armed my copter at the begin of the flight I saw that it was a 6-7 Amps of current when motors were not rotating at all! (I’m using MOT_SPIN_ARM = 0)
It was the same anomaly with curent and baro readings:
FC and other modules are supplied by external power module that connected before ESC (i.e. consumption of my electronic does not affect on current sensor)
There is oblivious correlation exist between Current and Baro pressure when that issue happened. But current sensing is just an analog pin; Baro sensor using digital I2C interface.
I suppose following causes:
Current sensor fault and incorrect current value goes to FC; but why this affects Baro pressure?
Baro affected by wind/sunlight/vibration etc; but why current increased accordingly?
Firmware internal problem when managing sensors data?
@rmackay9, is it possibly that this isuue is caused by the fix:
Copter 3.5.1 31-July-2017 / 3.5.1-rc1 24-July-2017
Changes from 3.5.0
fix to RC input corruption when using Spektrum DSMx with Pixracer
Because Current and Baro readings looks the same, just mirrored.
This is impossible to explain by radio or magnetic fields interference. Or other physical factors.
I was wrong, it is possible if there is a third system involved.
433 Mhz radio transiever could dramatically affect on FC.
That should be a warning for those who uses telemetry, long range RC systems etc.
In my case there is a tBeacon that is configured to transmit a message when turned on and 30 minutes after.
When a transmission begin, baro altitude increases for 30 meters up.
So happy end)). Exept this incident copter hovering and flies super stable.