Announcing QGroundControl 4.1
The last stable version of QGroundControl version 4.1 has been released. New versions are currently available for Windows, Linux, OSX, Android. The iOS version will take a bit longer to come out.
You can install QGroundControl 4.1 from here.
Here are some of the new features in QGC 4.1. There is a bit more detail in the change log. This release as always contains many bug fixes as well as new features which may have missed inclusion in the change log. So the list below is likely missing all sorts of interesting things.
Fly
- Support simple cameras which only support DIGICAM_CONTROL in the Photo/Video control on Fly View.
- Video Streaming: New camera control supports capturing individual images from the stream
- Press and hold on arm button will change it to Force Arm. Click again to force arm.
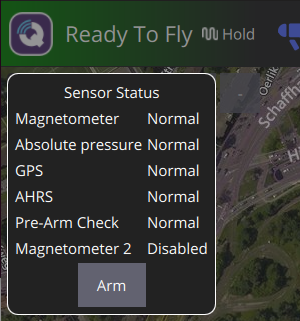
- Ready to Fly indicator in toolbar
- Based on Mavlink
SYS_STATUStelemetryMAV_SYS_STATUS_PREARM_CHECKvalue
- Based on Mavlink
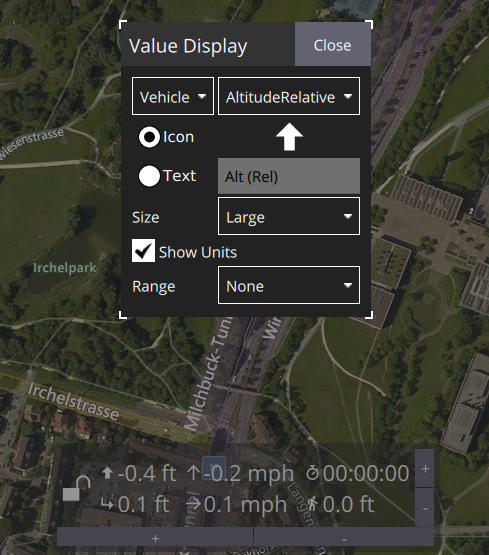
- New instrument values display/editing support
- Includes ability to use an icon for labels instead of just text
- Includes ability to set ranges of values which show different icon of different coloring
- Rearchitect view and controls within for much better customization support in custom builds
- RTK GPS status can be seen in toolbar without vehicle connection
- Click and hold on “Arm” button will switch to “Force Arm”
Plan
- Maps: Support zoom up to level 23 even if map provider doesn’t provide tiles that high
- Support mavlink terrain protocol which queries gcs for terrain height information. Allows planning missions with
MAV_FRAMEofTERRAIN_FRAME. - Better support for VTOL takeoff including transition distance
- Added new VTOL Landing Pattern support
- Much better conversion of missions to KML for 3d visualization/verification of missions
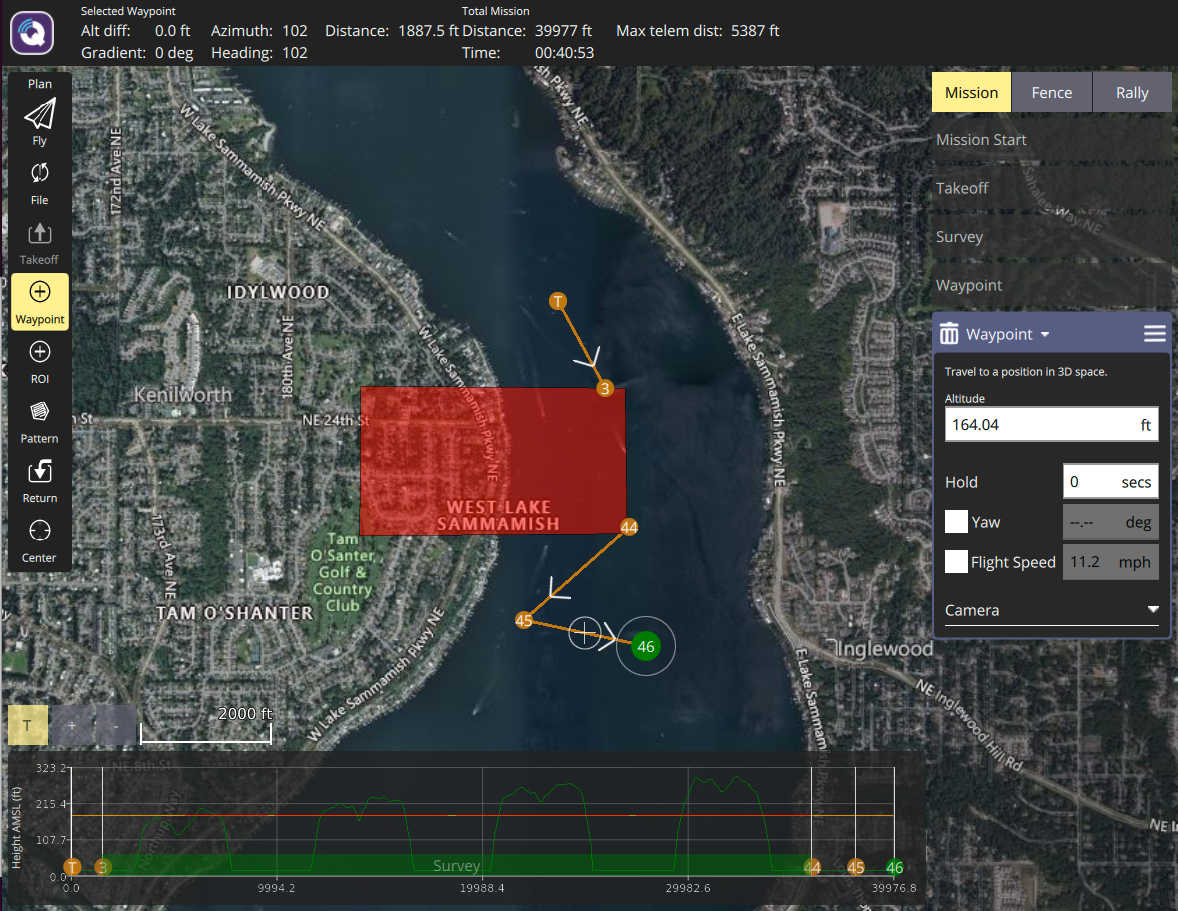
- New Terrain Profile display including terrain collision indications on profile and in patterns (Survey, CorridorScan, etc)
Vehicle Setup
- Load Parameters From File: Support loading parameters which don’t currently existing on the vehicle.
- Load Parameters From File: Add dialog which shows diff of file and vehicle params. Selective param upload from file.
App Settings
- VTOL: General setting for transition distance which affects Plan takeoff, landing pattern creation
- Mavlink: Add ability to forward mavlink traffic out specified UDP port
A few screenshot for new features
New instrument values setup
Ready to Fly indicator

Click Ready to Fly to see sensor status and Arm/Disarm button
Terrain Profile showing terrain collision in survey area
Documentation