Hello,
I have a apm 2.6 with external GPS and compass combined, got it from ebay.
I flew the first part in stabilize and the second part in loiter, I had 2 flights before this, in total around 15 minutes flight time, no problems but the only thing was the OSD that dissappeared when I start flying when it was on the ground the OSD was on the screen.
Physically there was nothing wrong as far as I saw, no overheated motors, no overheated ESC, no broken connections.
This is the link to the footage of the crash: youtu.be/mfRxoE0dufo
I will add the log files to this topic.
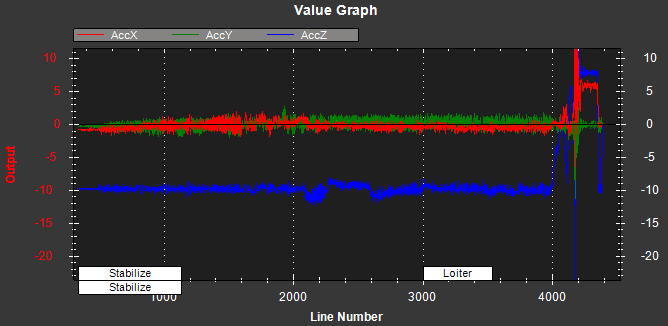
I also have the question if the vibration on the apm are within the limits?
Thanks!
I see nothing wrong
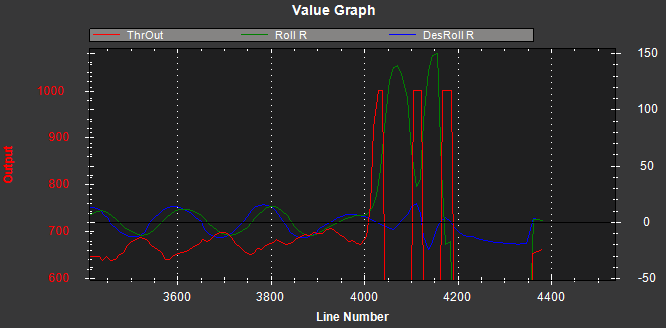
There was a sudden positive roll (to the right) and negative pitch (forward) so probably (I say probably) the front right motor/esc has failed. to compensate this failure there ThrottlOut is at maxright before the crah
Try to increase the log verbosity to NearlyAll in order to see RCIN and RCOUT.
Also try to run an Autotune, your gains are low.
As for vibration it’s good. except for the moment of crash which is normal 
Okay thanks for the fast and good reply.
I check the connection and found out that the factory soldered connector to the motor was very bad and broke off. Im going to resolder it and will be checking all the connections.
About the autotune, I’ve already done it once but it was very windy that day.
Thanks!