Hello.
https://ardupilot.org/plane/docs/qrtl-mode.html
in this page, it says plane will ascends to Q_RTL_ALT before RTL transitioning, if it is in VTOL mode.
https://ardupilot.org/plane/docs/quadplane_rtl.html
in this page, it says copter will decends to Q_RTL_ALT when entered in waypoint loter radius(or rtl radius)
so I have three questions :
(1) Q_RTL_ALT determines the altitude that VTOL climbs before transtioning when RTL, not ALT_HOLD_RTL? it will transit at Q_RTL_ALT first, and then climbs to ALT_HOLD_RTL?
(2) is that right Q_RTL_ALT determines two altitude? :
- the altitude at start point of RTL if it kicks in VTOL mode
- the altitude in the destination
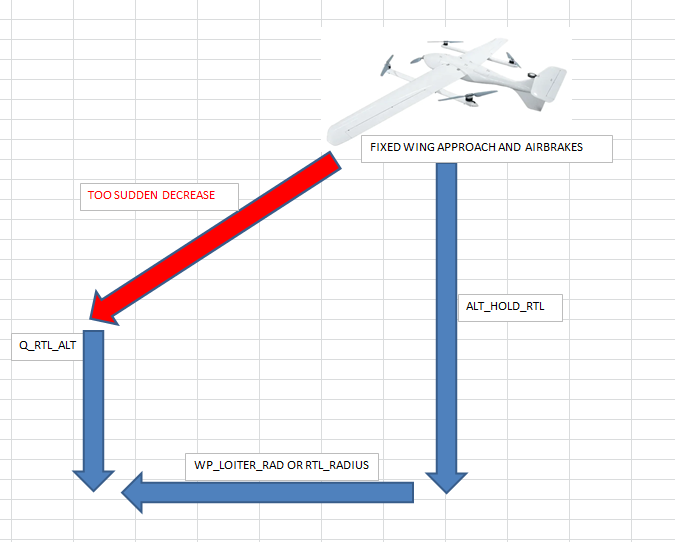
(3) so, it is dangerous if there is lot of difference in ALT_HOLD_RTL and Q_RTL_ALT,
because the waypoint radius is not enough the plane to decrease altitude from ALT_HOLD_RTL to Q_RTL_ALT, its altitude decreases too fast.
(as decribed in picture)
I looked into Q_RTL_ALT paramter description here but there is only one brief description, which confuses me : Complete Parameter List — Plane documentation