I’m hoping this is an easy one. I’ve got a PX4 with an M8T on-board and also a Chinese M8N, mostly for the compass. My GPS status is consistently “4”, though I’m not sure what that means. I’m also using the state network for NTRIP.
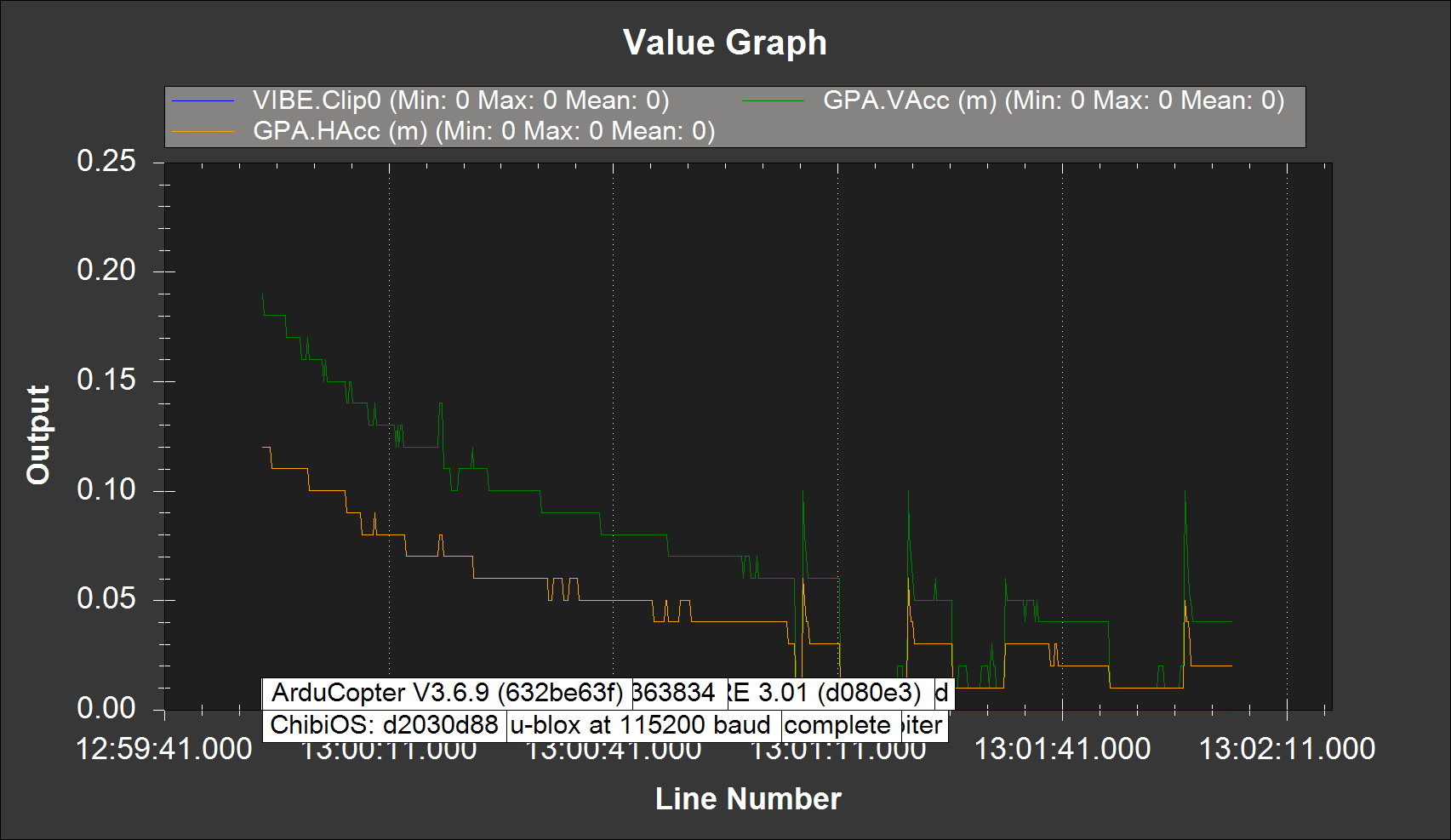
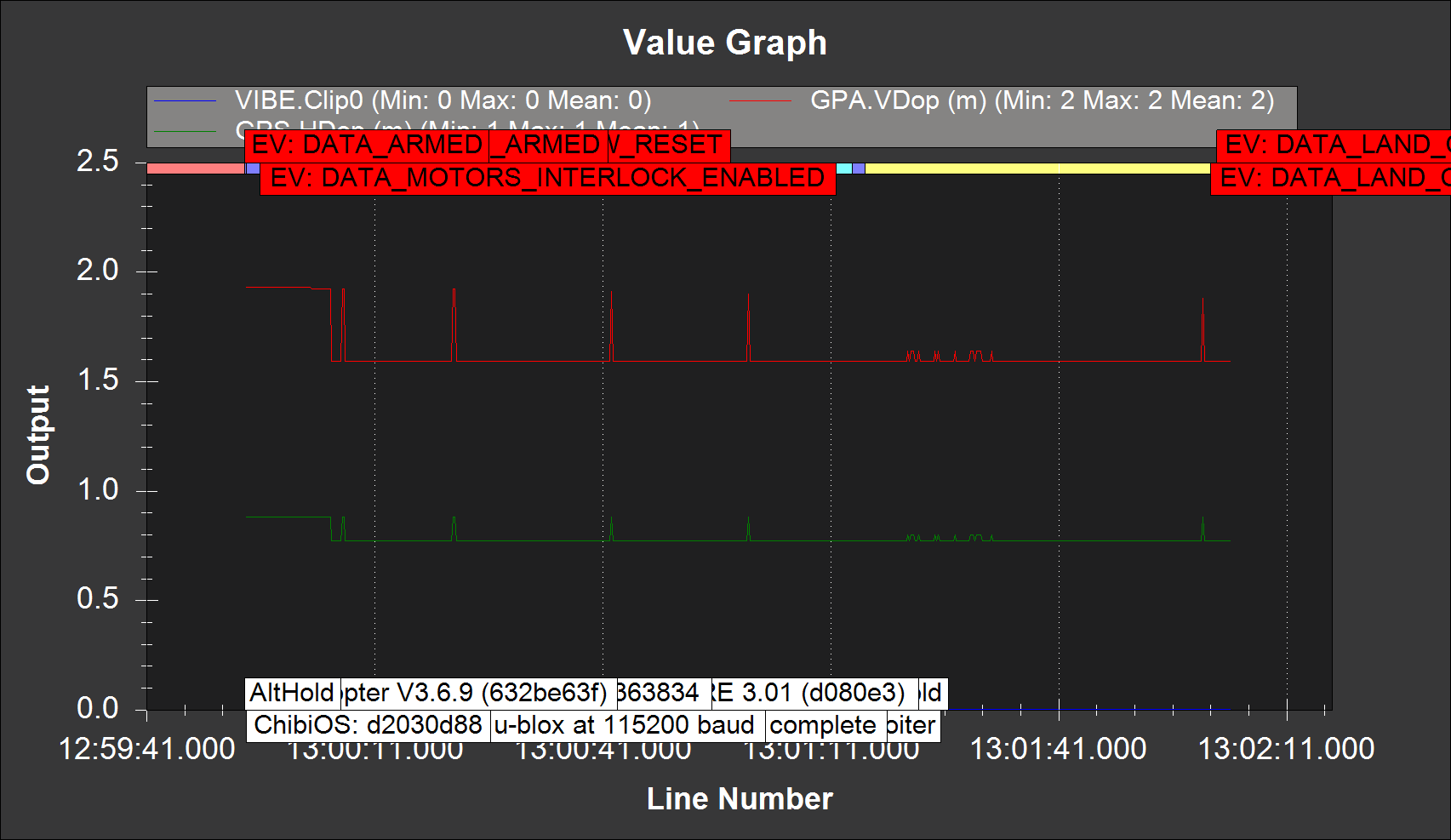
How can I tell what my accuracy is? Is it GPS HDOP? And if so, is that in decimal meters of accuracy? I’m getting .4 to .5 HDOP numbers, but I have no idea how to tell if that’s raw GPS or what, if any, the NTRIP feed is contributing.
Where can we get a measurement of accuracy on the GPS position?
The M8 GPS does not report an estimated positional error that I have found.
The best way to check is to repeat a few power cycles in the same place and look at the numbers.
My test and others have been far from CM. However Ublox clams much better results using their antenna.
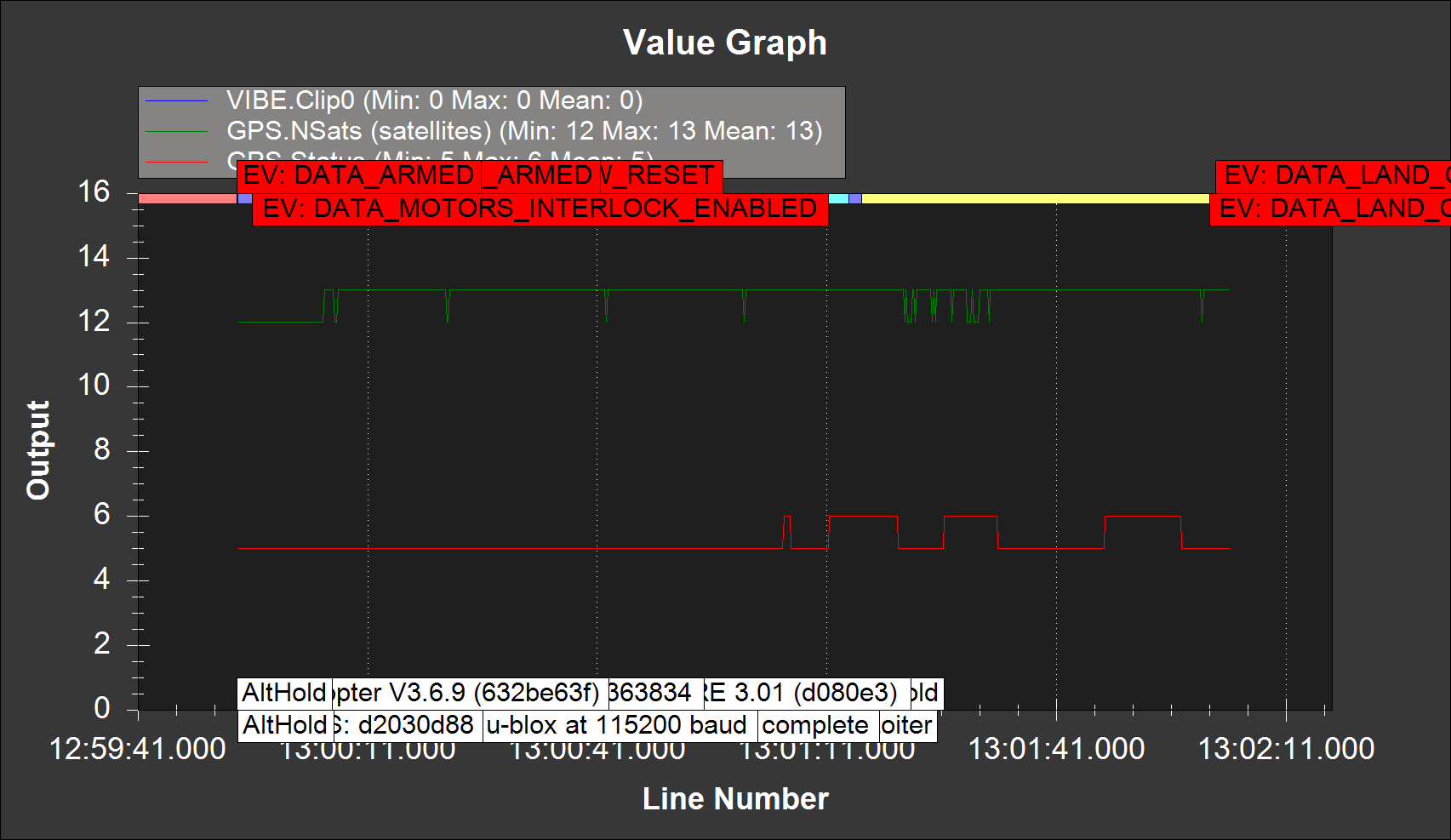
It means it has a DGPS fix, and it should be 10CM if it is true DGPS, not as good as float “5"or RTK fix"6”.
The controller looks for at least a 3 before arming.
HDOP - Horizontal Dilution Of Precision it does not mean the GPS is accurate it indicates how good the triangulation is. If the sv,s are blocked or in one part of the sky due to orbits your DOP goes up.
PDOP is a combination of HDOP and VDOP and a much better indicator but Ublox does not report these # either.
They have some things to work on.
I have RTK inject enabled and an NTRIP feed coming form the state’s network. Is there a way to tell if that’s working or having an impact? Also, how would one go about troubleshooting GPS and RTK injection? I know you said there’s work to be done, but there’s got to be a log or something somewhere, right? I’ve configured it according to the guides, but I don’t know how to verify that it’s actually working or to troubleshoot it if it’s not.
If RTK inject is working you should see “5” or “6”
Is your Mavlink working?
Trouble shooting? Look at, SNR ratio set to 35, Elevation mask set to 13-15 deg.
With a good antenna straight up sv’s have snr above 52 -54. If you do not see those numbers you may want a better antenna or ground plane.
Thanks, I’ll check those numbers the next time I go out.
Mavlink is working. I can control the rover from the ground station.
Is there a document for tuning GPS and RTK? I appreciate the recommendations, but I haven’t read of these settings in the docs. I hate asking questions on the forums about stuff I should have read about already!
@Michael_Oborne is working to implement MP control of these GPS settings currently the access is in ucenter software under nav5 messages. I do not find a WIKI for GPS tuning.
I think the problem is the M8T I do not think is’t a RTK receiver. It’s carrier phase but may not be RTK programmed. @kikislater knows more about the M8T perhaps he can confirm.
So it appears that I would need an RPi running RTKLIB or something in between the M8T and the Px4 to get RTK working. Is that accurate? I’ve read today that the M8T will output RAW, but that must then be processed with correction data externally and then fed to Ardupilot. And that then I might get an RTK-fix…
I think you are right, I could not find any RTK info any the M8T receiver.
Using M8P’s is simple & more common. The new f9p are the same price range too (but most modules have no compass). These F9P work much (10x) faster to RTK fix.
Since you have 2 GPS already you could replace the M8N with a M8P or F9P, then still keep the L1 timing from the M8T.
The Hex Here+ GPS is an M8T I think… it’s an L1 Ublox GPS. We have very lengthy setup instructions on the wiki although I didn’t write them myself so I can’t guarantee their accuracy but if you do try them any feedback is very welcome!