Due to weather, I haven’t been able to perform a full autotune yet but before I do, I wanted to see if I I could get some input on this odd altitude sinking issue. I’ve attached a few logs below as I’m not sure what to look at for this issue.
At hover, the quad will sink 3-5 feet and eventually slowly recover seemingly to a higher altitude than originally commanded. The baros are contained within the body and not open to the outside air so prop wash shouldn’t be the issue. The FC is a Cube Orange+ for reference.
VibeX below 8.5, VibeY below 10 except for a single peak of 14, VibeX below 12.5 all on average not terrible. Yes I can improve that but I’ve seen worse in builds without this issue.
Baros/FC are/is fully enclosed inside the body. Not sure how much more they can be isolated.
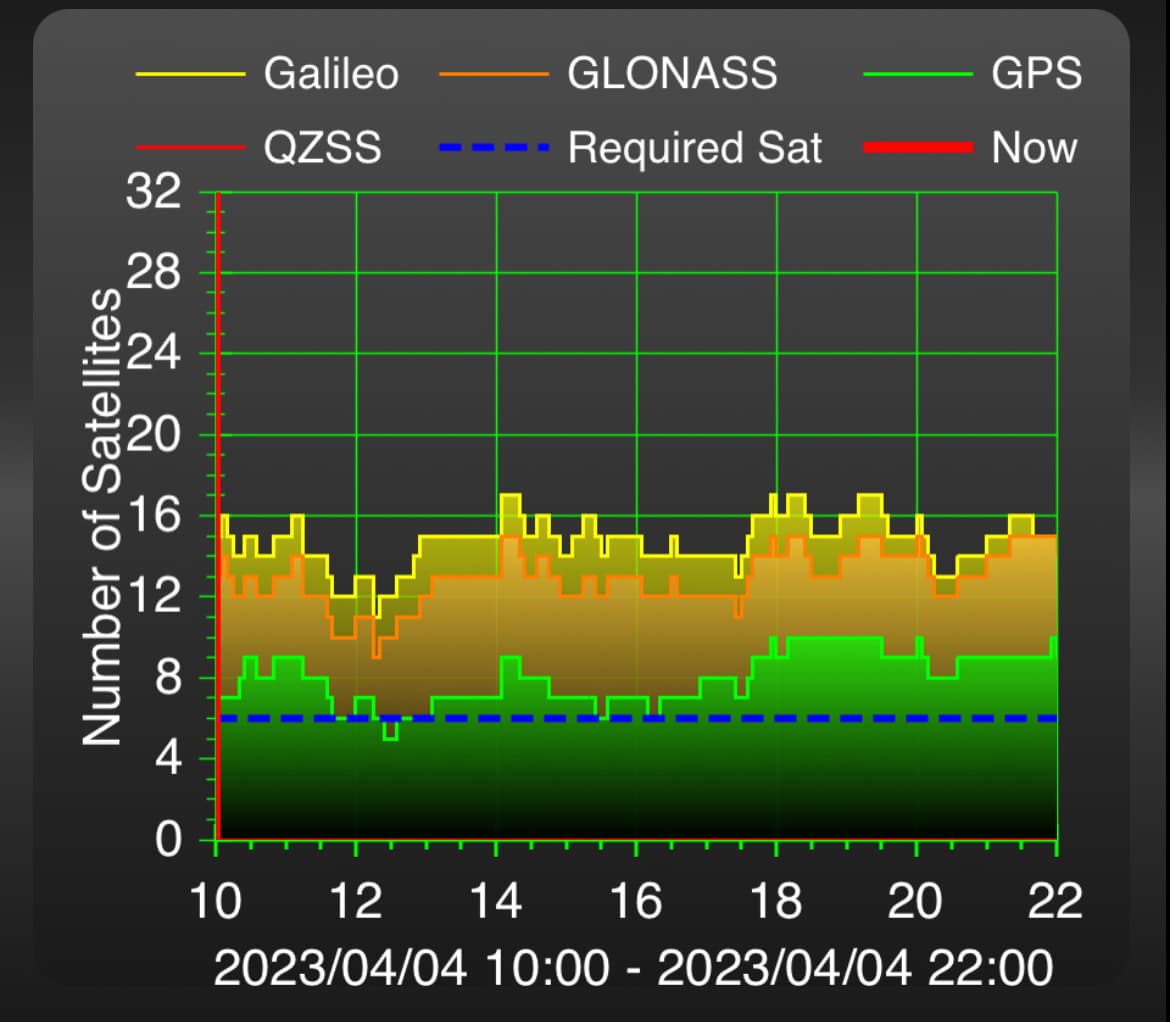
HDOP is .66 currently w/15 sats in view. .7 is about as good as it gets around here. The below images are all I’ve got in my area.
I’ll try both GPS & GLO and GPS & GAL and see which of the combo’s works best. Is there a place in the log that shows what the refresh rate actually is during a flight or does ardupilot just take up to what’s set as the max? Should note this is a here3+ with an update rate of 8 hz. Ardupilot is set as default 5 hz.
Edit: Found it. (GPA.Delta) Going through the logs over the past few days, it looks pretty consistent at 200ms with brief dips to 199ms & a few spikes to 202.5ms. So to answer the question, no the rate is not consistently above 5 hz.