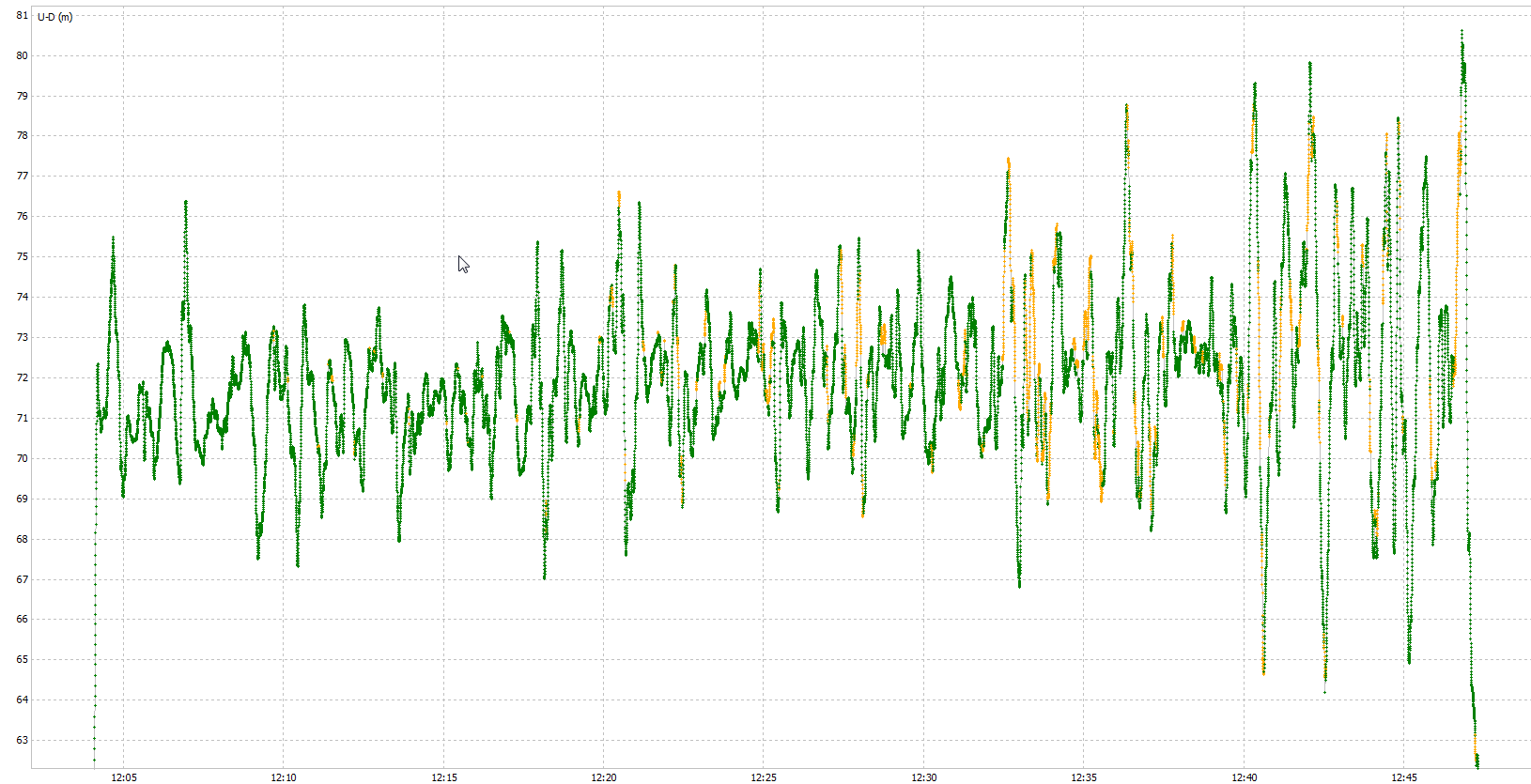
I use My Fly Dream Twin for a while and it flies very well, the only thing I notice is that corrects altitude too violently, using too much pitch to go down then a lot of motor to gain altitude again, correction goes from 10 to 20 degrees, here a log from the Reach GPS onboard showing a 45 minutes flight.
What is best to tweak to correct this?
Thank you
It sounds like you should investigate the Total Energy Control System: TECS.
http://ardupilot.org/plane/docs/tecs-total-energy-control-system-for-speed-height-tuning-guide.html?highlight=tecs
1 Like