I’m looking for some guidance on tuning a fairly large copter (G06 agricultural drone with 22” props). Firmware is 4.3.6, running on a Cube Orange.
I have completed a round of autotune in pitch and roll axes (AUTOTUNE_AGGR = 0.08) starting with the PID values suggested in the tuning Wiki for this size copter. The PID values derived from the autotune came reasonably close to the Wiki, and the roll and pitch values are also very similar to each other. At first it felt like a reasonable tune, but on later flights I noticed some oscillation, which appears to be in the Z axis, ie. bobbing up and down. Also, the logs show the PWM outputs for all four motors are modulating in sync.
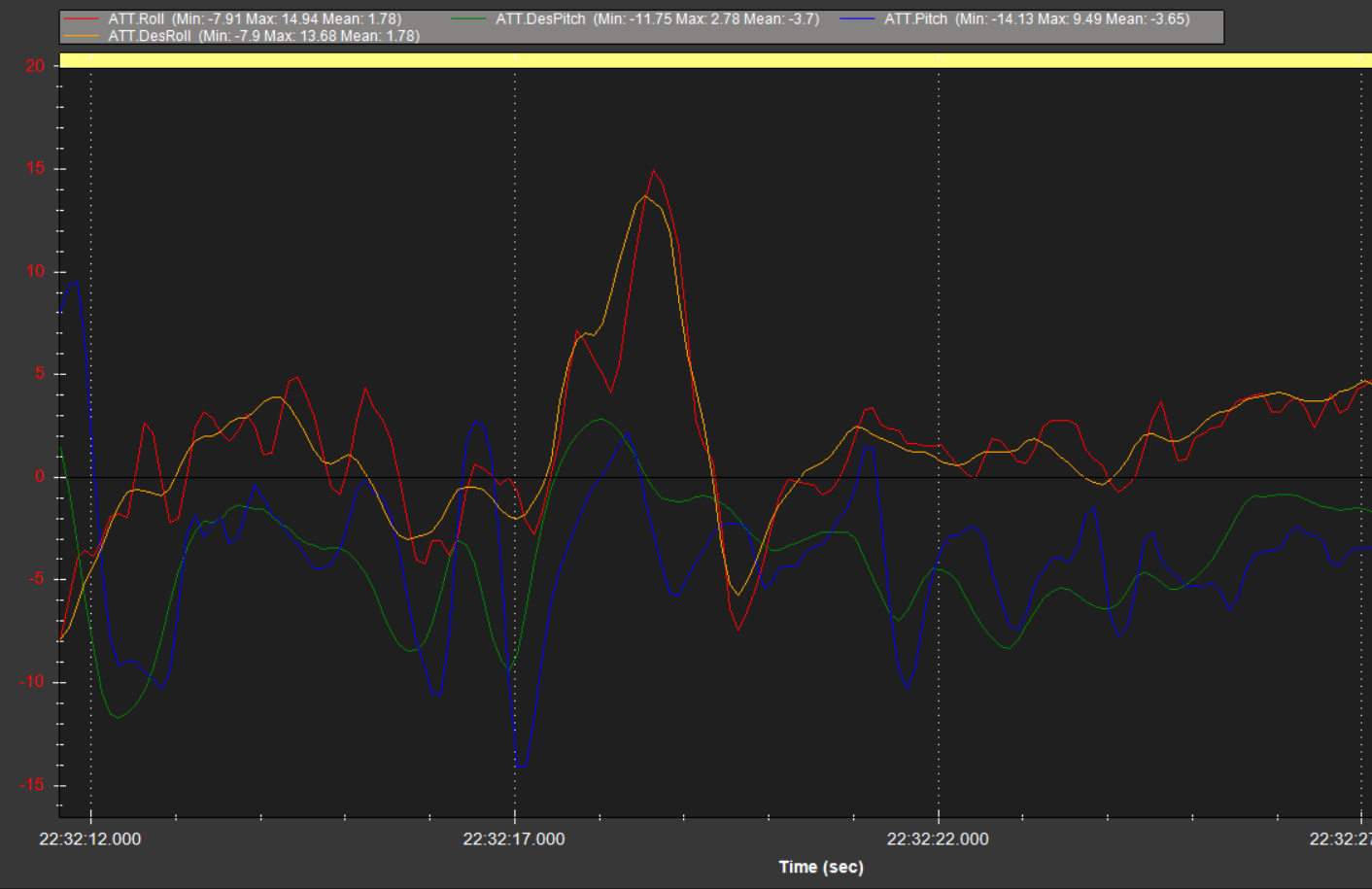
I have also noticed some overshoot in the pitch axis eg. when pushing forward and then bringing the drone to a stop. The roll axis tune seems tighter, with actual and desired angle tracking closely.
I had a dig around on the oscillation issue and others have fixed this by increasing PSC_POSZ_P, but it had no effect in my case.
Log can be found here:Flight log

Flight video can be found here: Video