Hi all,
I’m having challenges with Pixhawk altitude sensor. First of all I want to inform about my vehicle.
Type: X8 Quadcopter
Motor: XRotor Pro X8
Propeller: Foldable 30 inch
Battery: 2x 22000mah (serial connected so 50.2V and 22000 mah total power)
Weight: 20kg
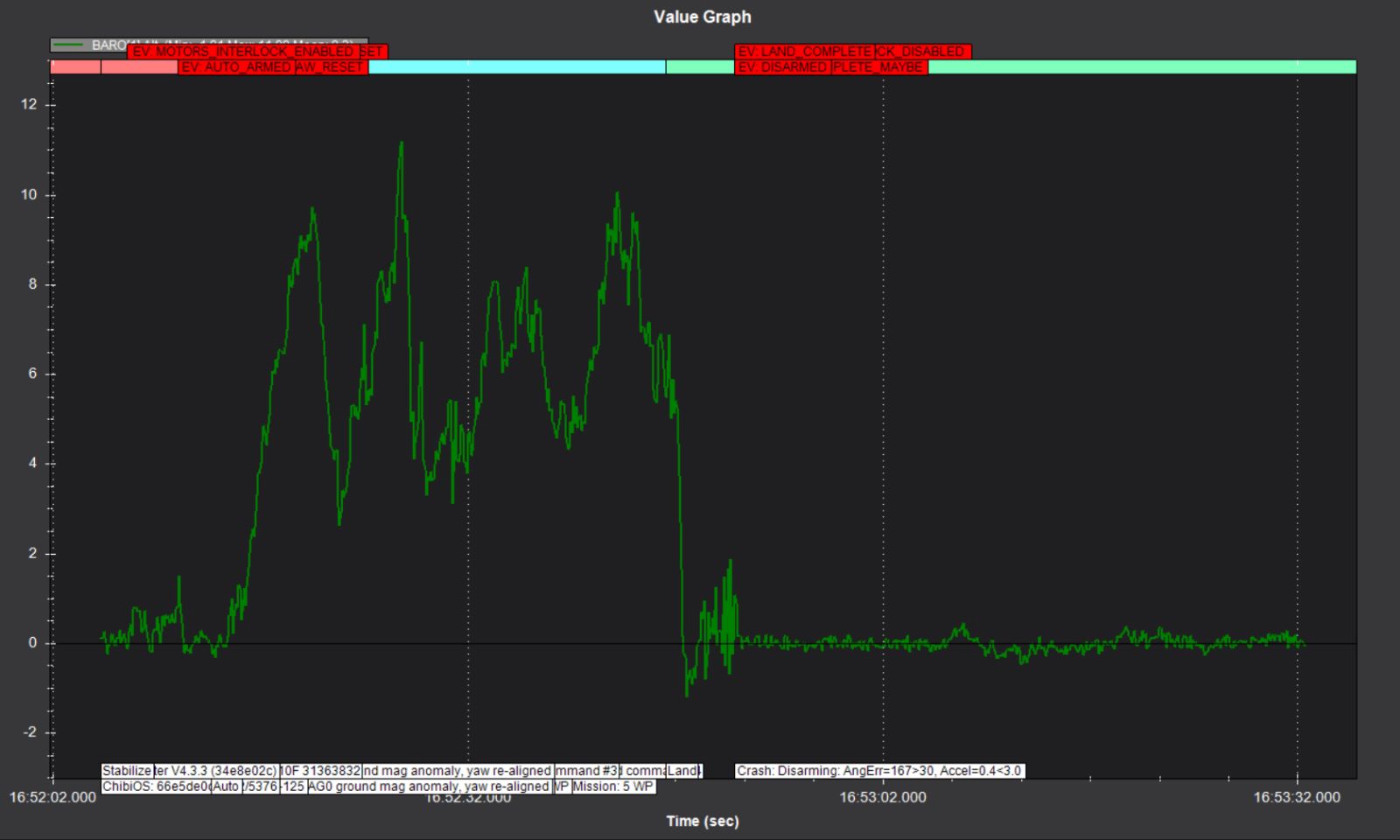
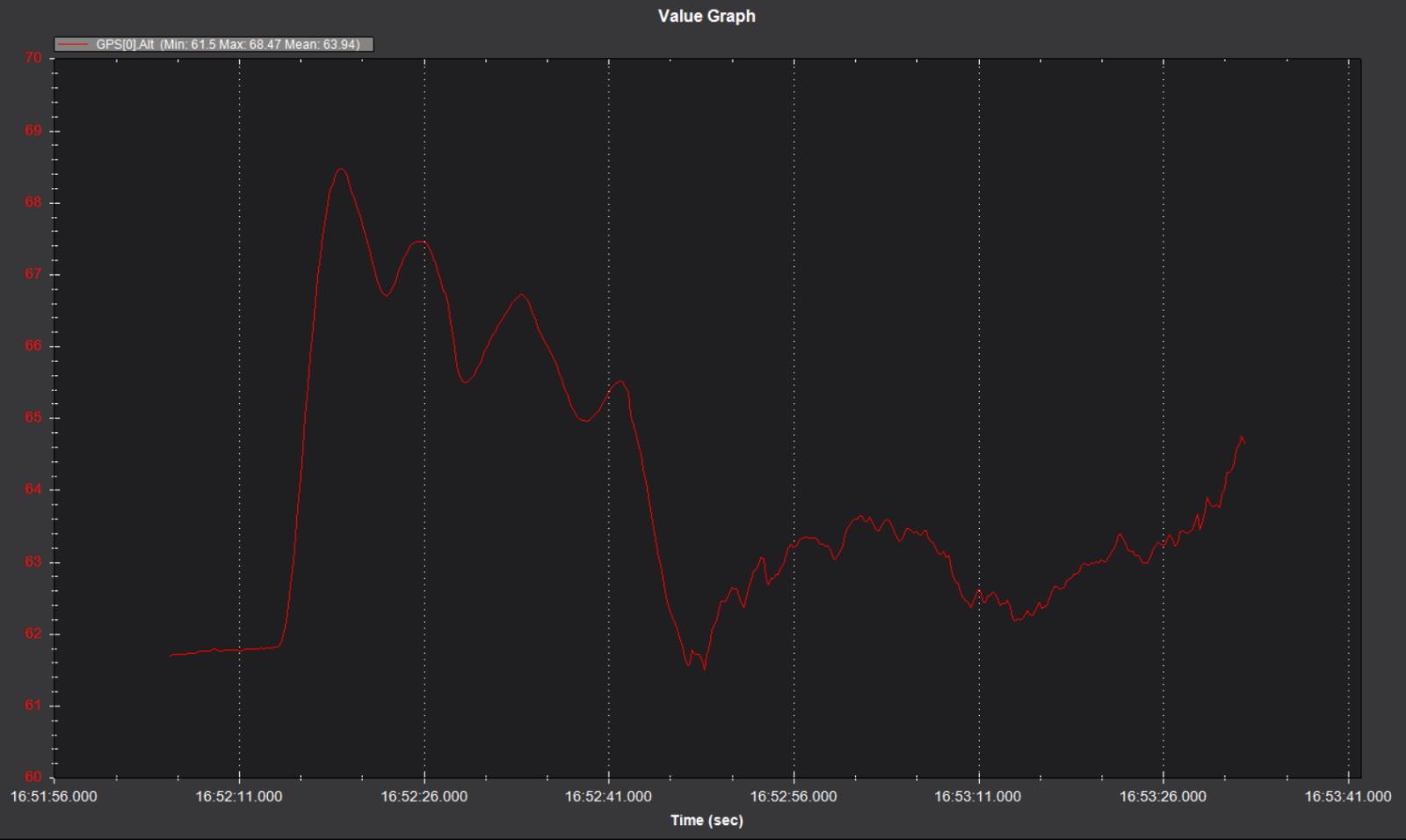
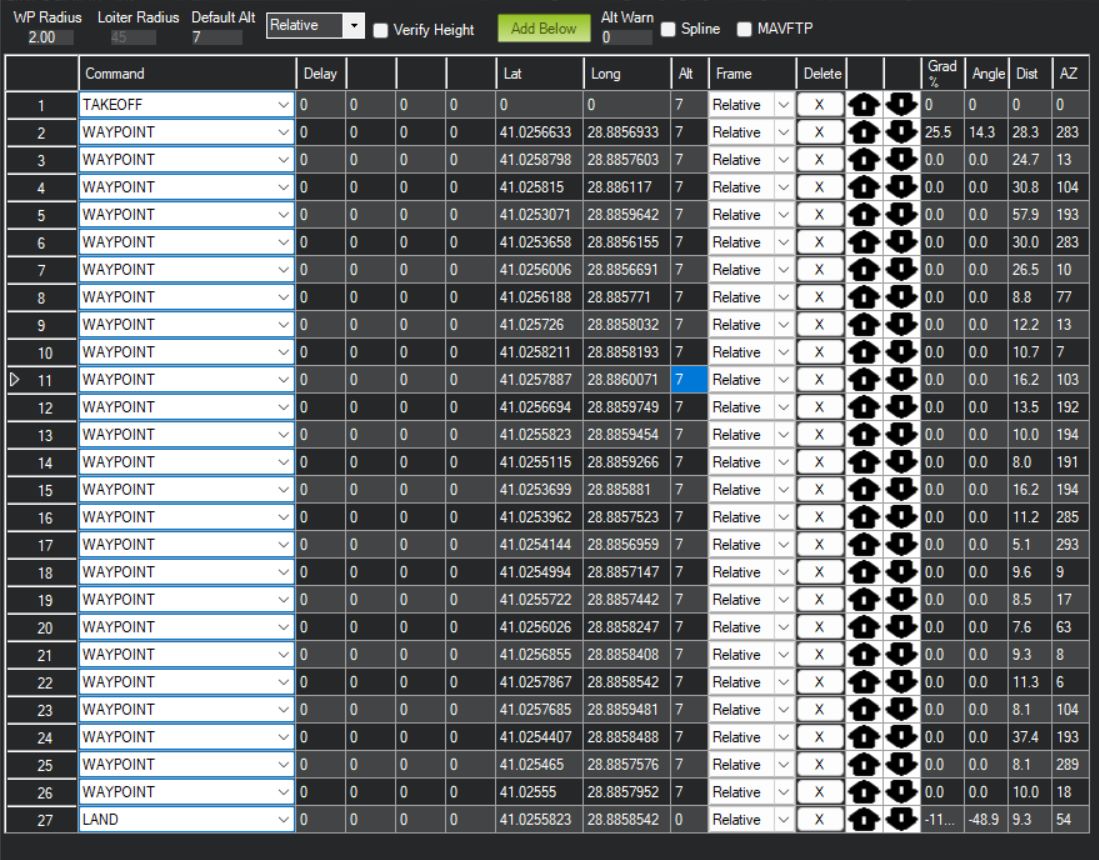
My vehicle, which has X8 chassis type, loses height when it moves on the pitch and roll axes. Especially in the pitch axis, that is, in forward and backward movements, the vehicle loses height from 7 meters to almost 1 meter. When I look at the flight time from the mission planner interface, I see that it is not aware of losing altitude because it always shows that it is at 7 meters. In autonomous flights, when it is ready to move to the next waypoint, it realizes this while correcting itself and corrects the altitude.
I’m getting the same trouble even though I’ve done all sorts of advanced calibrations. Currently, with my team, we are investigating the pressure change created on the chassis due to the propellers when the vehicle makes pitch and roll movements. I tried to use an external barometer and position it in other places, but the same problem continues.
Since we won’t be flying very high, I want to use lidar as the altitude sensor. In addition, I use Here 3 GPS and RTK GPS in the system, I want to make GPS the priority sensor for altitude nearby, but I have some reservations because I haven’t tried it yet, I really need your advice and opinions.