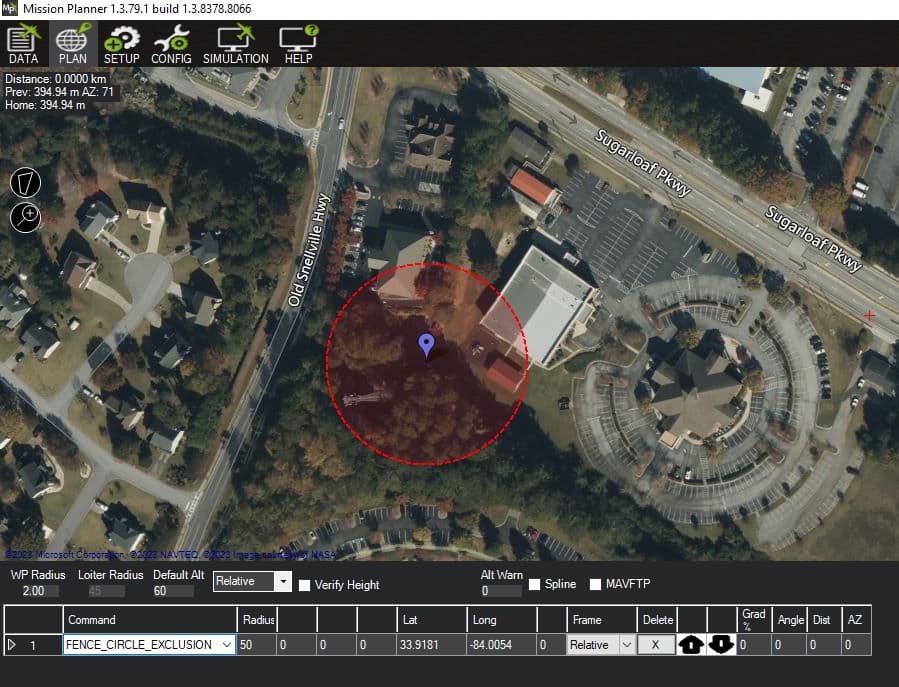
As sometimes the firmware changes faster than the documentation, I thought it might be a good idea to ask here to see if there’s still no way to accomplish a cylindrical exclusion fence with an altitude limit.
If not - it seems that for operations around known tall obstacles, such a fence might be a good feature to have.
It is best to avoid overflying critical infrastructure at all. If you are using copter both obstacle avoidance algorithms should work for all automated flight modes.
Plane on the other hand only triggers fence breach failsafe which IIRC might not reliably lead to clearing the exclusion zone.
I totally agree, it’s best to avoid critical infrastructure obstacles - where possible. In this case, the photo map survey requires flying over this cell phone tower.
When you mention “both obstacle avoidance algorithms” - I’m not sure what you’re referring to. Would you please elaborate?
I’m also thinking that for missions such as building or tower inspections, an exclusion zone inside an inclusion zone might be really handy.