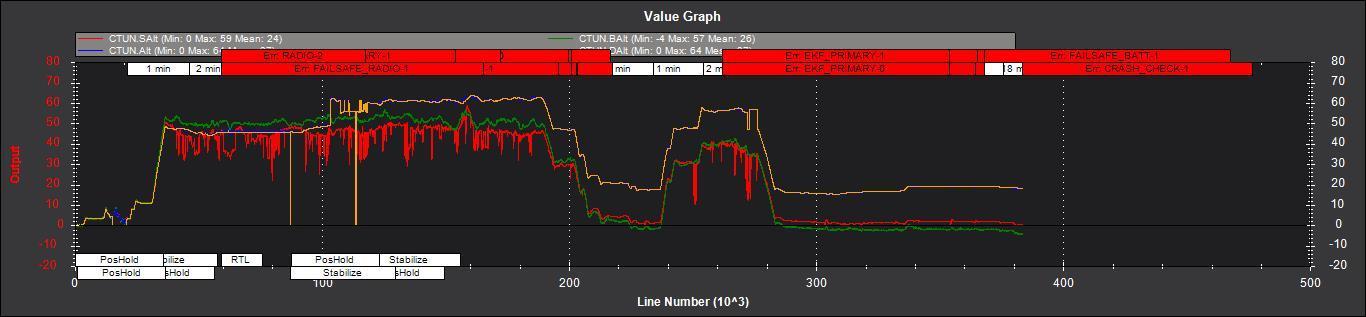
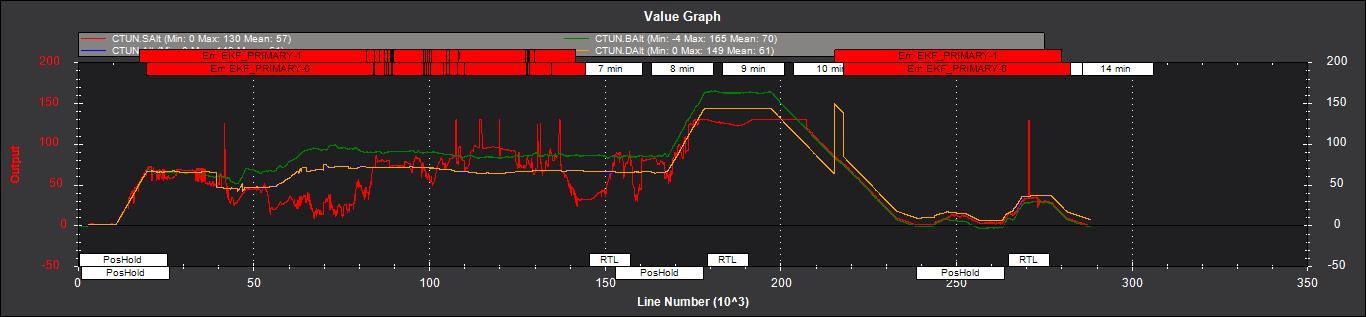
I have a copter under 3.5.0-rc2 with SF 11/C lidar installed. I have an issue with altitude flying both Auto and manual Position Hold missions. The problem is that the vehicle suddenly changes its altitude and OSD reports an error in indicating altitude which can reach 40 meters and more. Analyzing the log I found that while both baro and Lidar altimeters mostly agree about the altitude over the flat surface, the estimated altitude suddenly changes and deviates from them both:
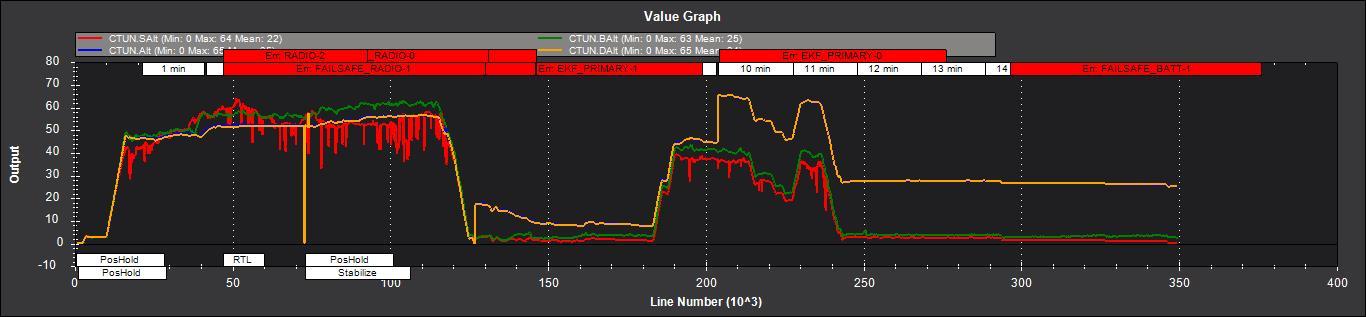
As you may see red line (Lidar) and green line (Barometer) are close to each other, while Yellow and Blue lines (CTUN/DAlt and CTUN/Alt) deviate sporadically (most noticeable at 10 min mark - seems like it somehow related to EKF change event occurred at this time) reflecting wrong altitude. I think this may be fatal when the vehicle thinking it’s 20 meters above its true position hitting the ground during AUTO mission. Could anyone help me with that? Full log is here: https://1drv.ms/u/s!AieROjktQIZ3jWAUKz4GLHAsFC4C
Thanks!