My plane can now fly remotely in stable mode. The previous automatic throttle has also been changed to RPM 1 control. When I first use Altitude Hold Mode, the plane suddenly rises. Please help to take a look and provide guidance.
My plane is a coaxial helicopter
Flight control hardware CUAV X7 PRO
Version: Heli 4.3.7
Hi @acef3c , before moving to non-manual throttle modes you should have a perfect tune of rate controller and accels/gyro readings in a safe range.
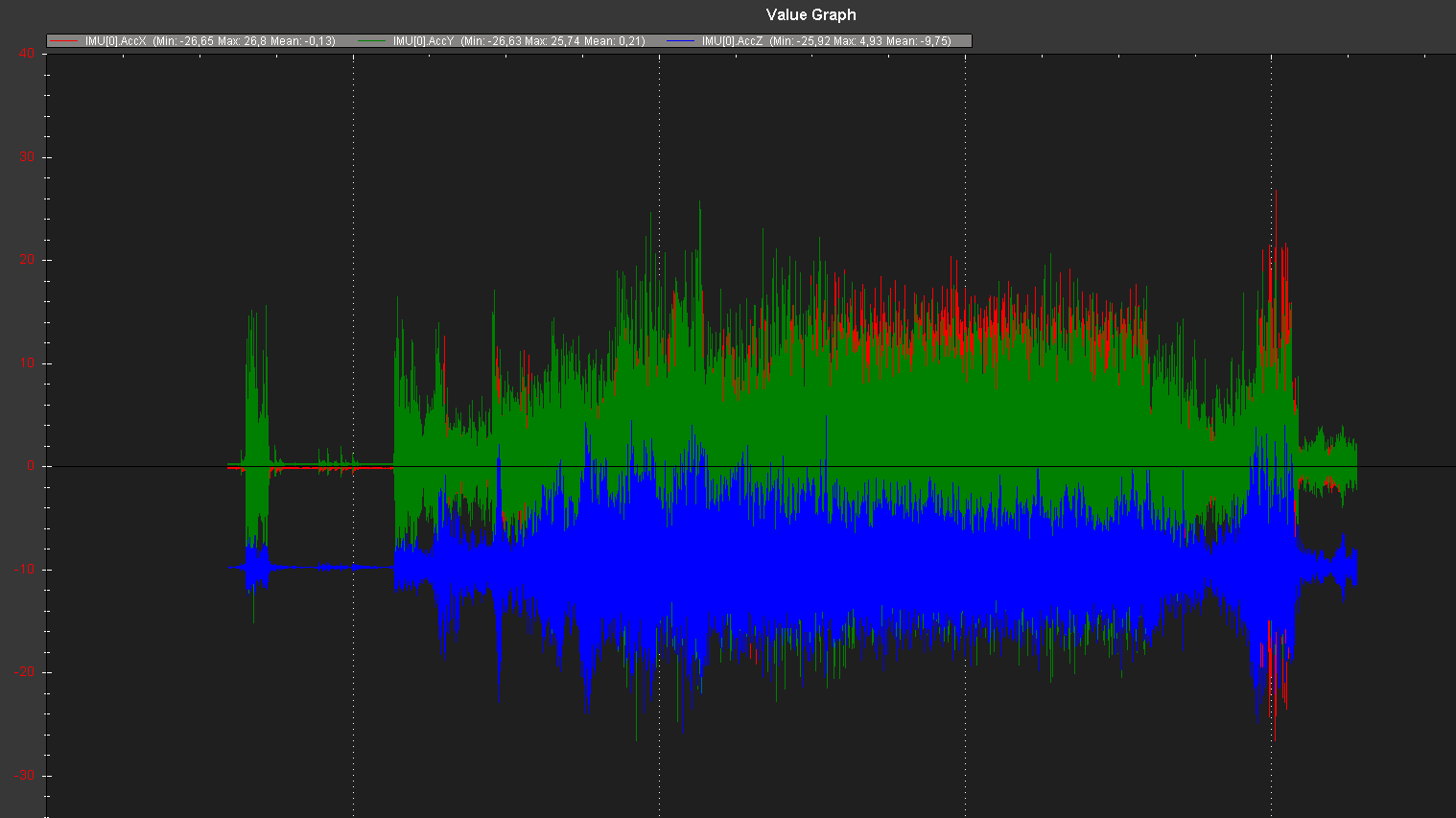
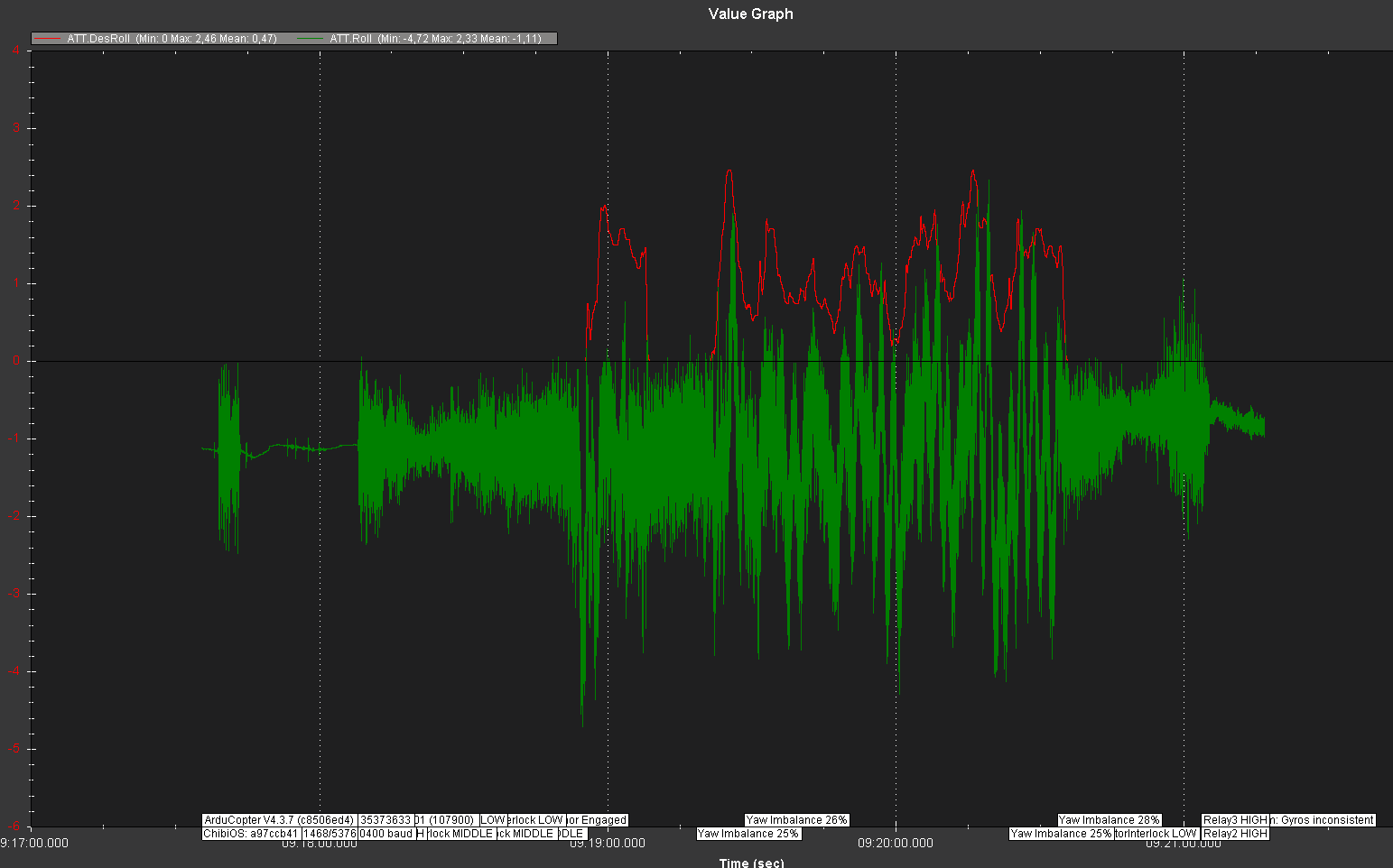
this is not safe at all:
Okay, I’ll try debugging it. What parameters do you think need to be debugged according to the logs. Can you give me some advice
I think a project on a platform that big (surely not a hobby project I believe ![]() ) would benefit joining the partners program, at least have you evaluated joining it?
) would benefit joining the partners program, at least have you evaluated joining it?
https://ardupilot.org/copter/docs/common-partners-program.html
1 Like