Hi Hi have a issues during setting up the indoor position hold .
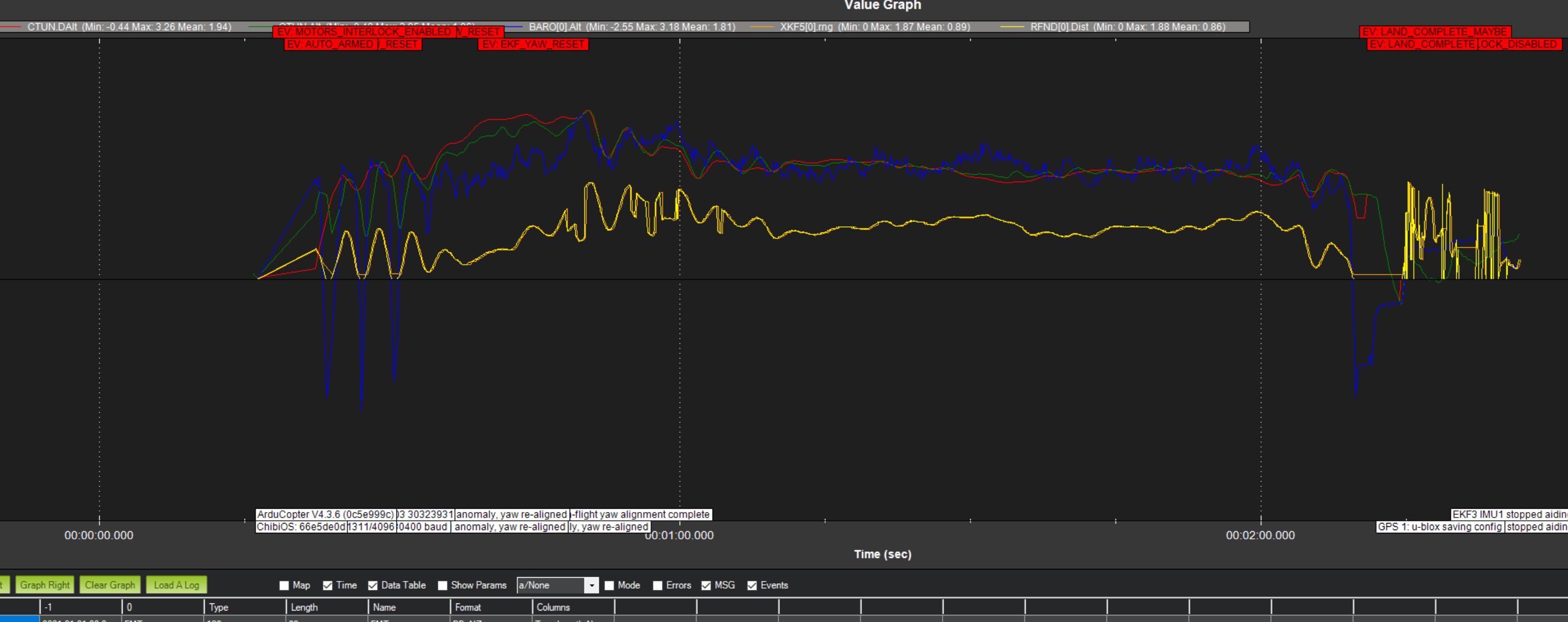
when using barometer the alt hold is jump up and down crazy at take off ( it was not like that before setup the optical flow test )
After setting to ek3_src1_posz = 2 ( which using range finder ) the alt hold working fine .
also do ek3_src1_posz = 2 is prioritize range finder then if range finder out of range it use baro or gps for second source ?