Hello,
I am working on flying an iris+ quadrotor indoors without GPS using an onboard computer to send attitude messages. The positioning is working well however the altitude of the copter will hold steady for about 30 seconds before starting to oscillate up and down and never recovering. Does anyone know of a solution to this problem? I am flying around 1m above the ground using a rangefinder. The rangefinder and altitude measurements seem to be correct.
Additionally the position hold I have implemented- a simple PID setting the attitude at 50hz based off of external data will also hold steady for around 30seconds then the copter will begin toilet bowling until I am forced to land.
I am running on APM:Copter V3.4.6
Here is the log file from the flight.
195 6-1-17-1059am Altitude oscillation PM.bin (742.6 KB)
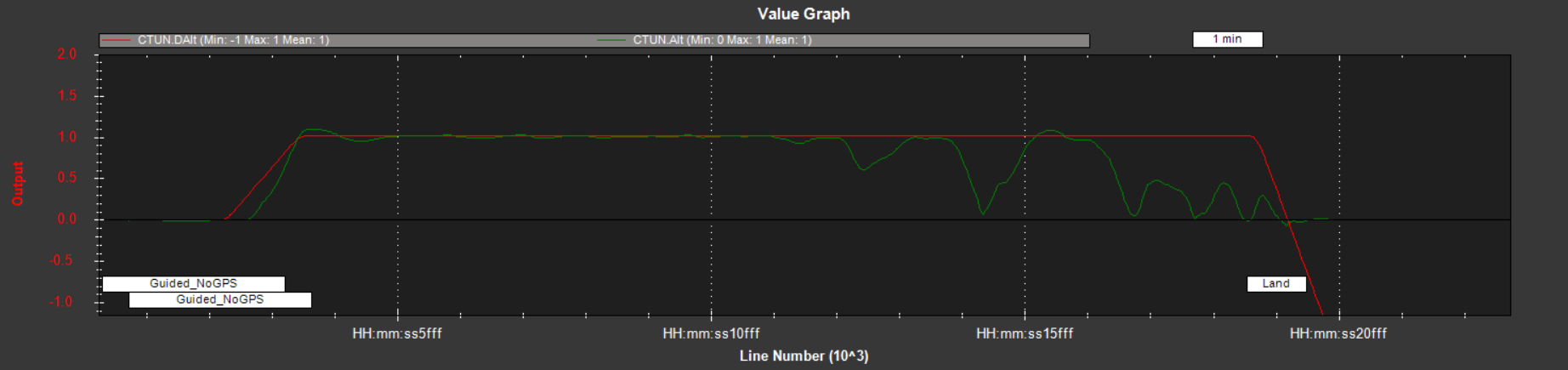
Here is the image of one of the major problems.