HI!
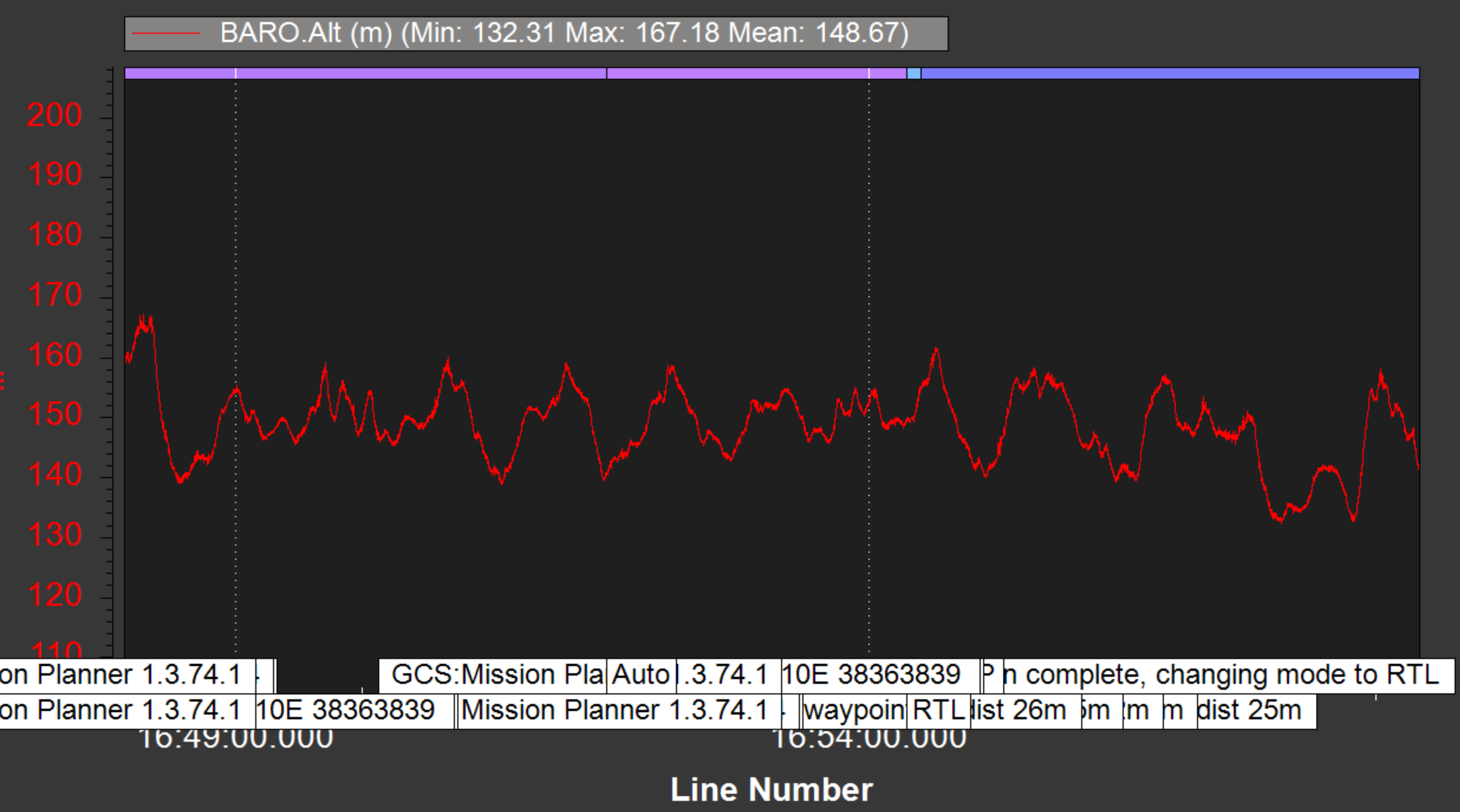
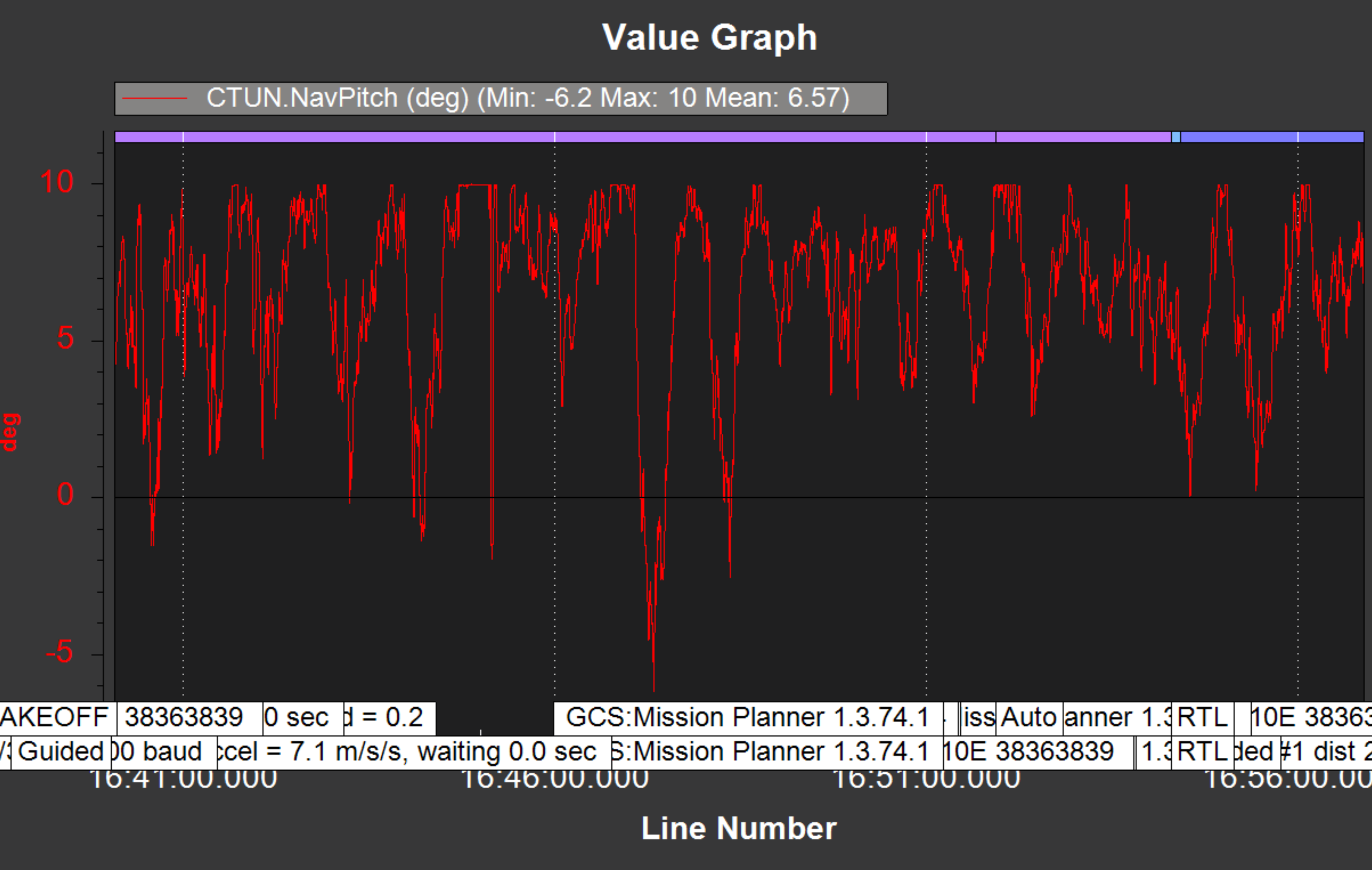
Lately I have discovered that in auto mode the nav_pitch and des_pitch fluctuate a lot during automatic flight modes. That results in unstable altitude and constant descend and climb behavior.
One reason I can think of is that the cruise airspeed is 20 and min airspeed is 18. is it possible that it tries to prevent a stall and decreases the des.pitch ?
(The pids are tuned)