Hello from the French Alps 
Here is a recurring problem I’ve got with my mini apm ( ge250 frame ) :
- Altitude loss wobbles ( happens as descending, sometimes at hover, stops as throttling up, or flying one direction, with two video samples : youtu.be/9GQTfRsQqs0 )
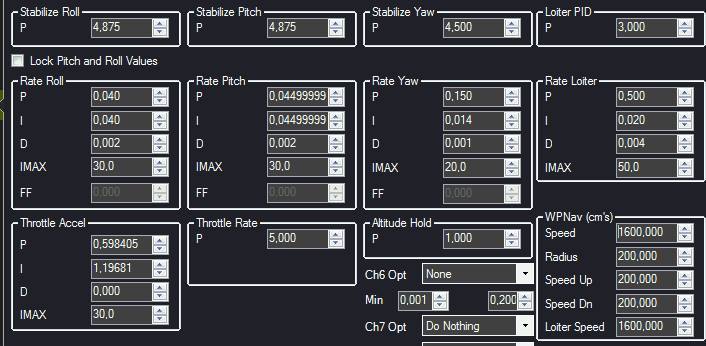
Here are my current Pid settings :
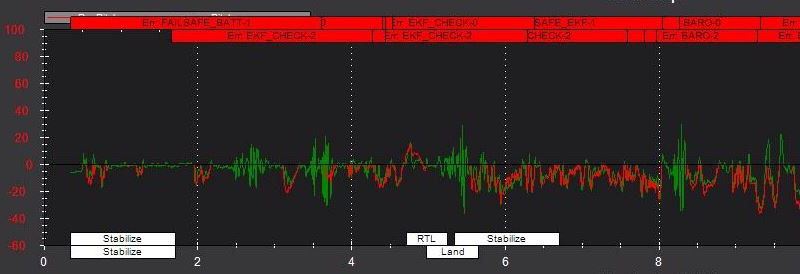
Then the altitude loss “wobbles” logs :
- Des Pitch ( red ) diff , green is effective :
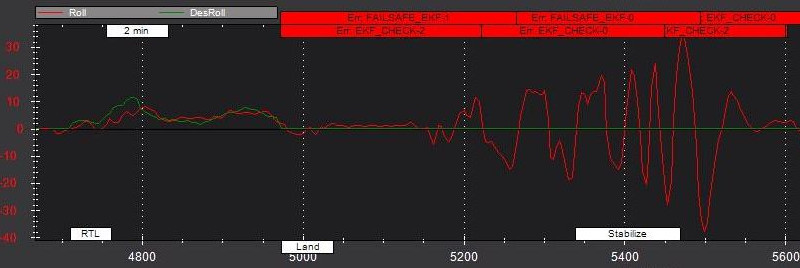
- Des Roll (green) diff, red is effective ( zoomed here :see the land command does the whole destab as soon as loosing some altitude ) :
Full Log: drive.google.com/file/d/0B9p2ZI … sp=sharing
Baro glitch : while AltHold or Loiter or RTL, the quad sometimes loses 2m/s, when this happens it destabilizes the whole structure, as seen previously, and might sometime lead to a flipover ending with a ground crash …
Wouldn’t there be a “min safe throttle” parameter, as any motor would’nt go below this point, as soon “takeoff” is completed ( kind of 30% if it hoovers at 40% ) ?
Another idea would be to limit the altitude drop to 2m/sec, so the quadcopter would remain “leveled” at altitude drop and wouldn’t wobble any further.
I usually takeoff above 1800 meters going straight to 160m high to take some mountain panoramic pictures … and do the altitude drop by circling the drone above my position, don’t know if it is that clever …
Thanks for any help, notes, clarification on these points