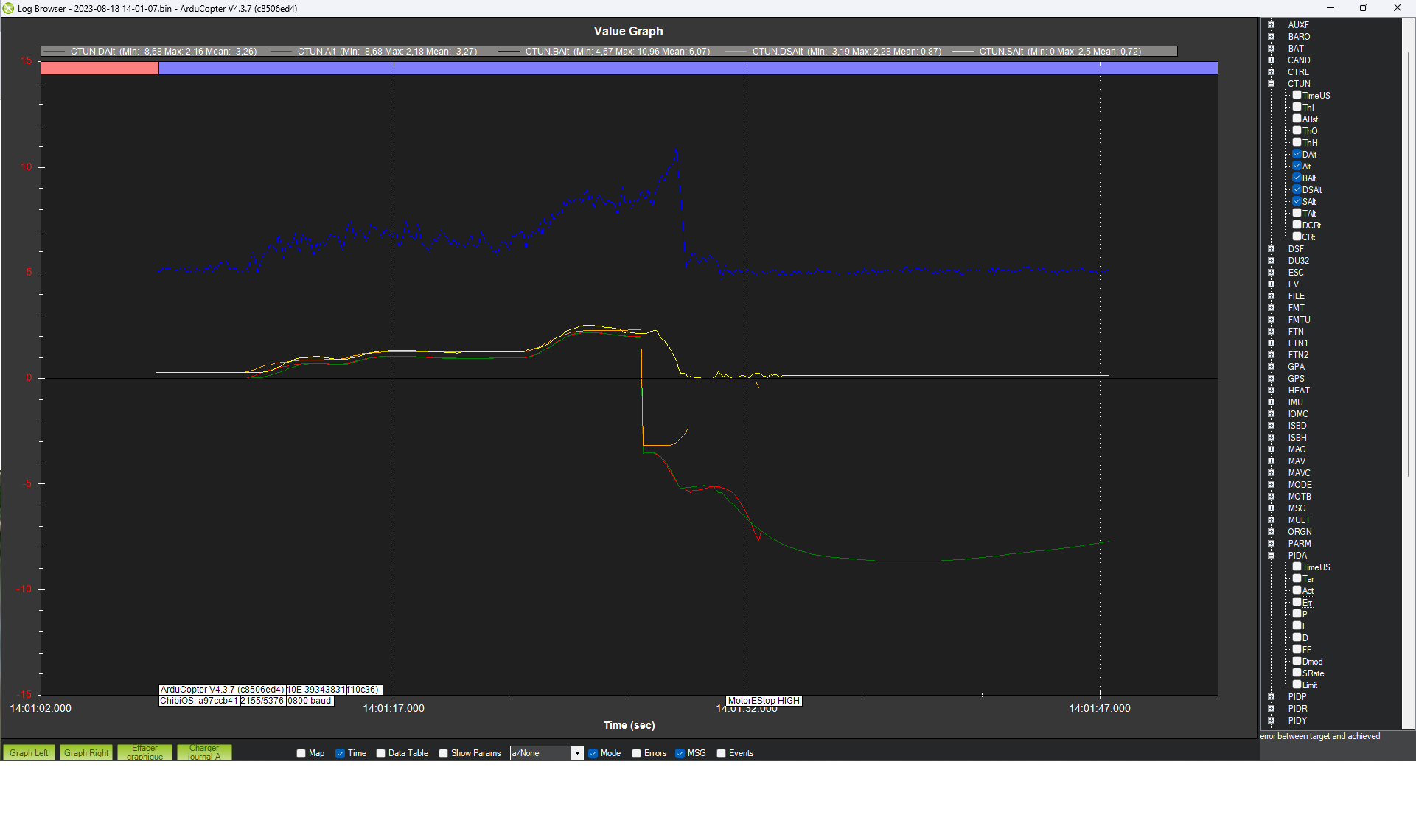
logfile
Hello,
I’m in the process of tuning a 10kg quad with 24 inch props. (more then enough power)
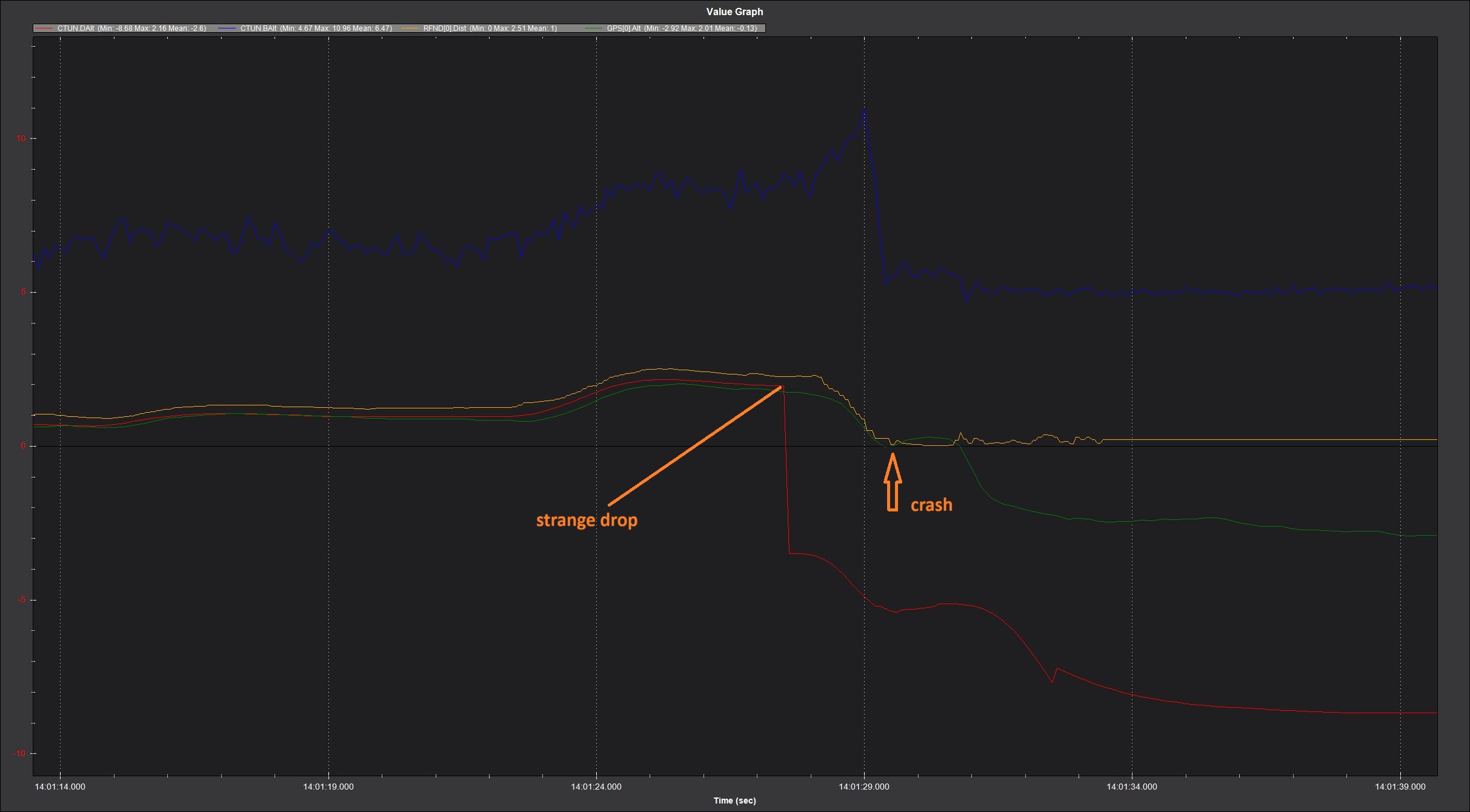
During hover in AH I pushed left roll and let it drift. After releasing the roll stick the copter suddenly dropped altitude and crashed into the ground.
It looks like all sensors (GPS, Baro and Lidar) confirm that the copter is going down while i’m giving full throttle. But somehow the desired Alt makes a gazy jump down. Maybe a bug in the EKF3 calculations?
Any idea where to look for a solution?