Hello, I am using copter 4.03 and I am trying to do was I depicted in the picture. I am using Qgroundcontrol to plan de missions.
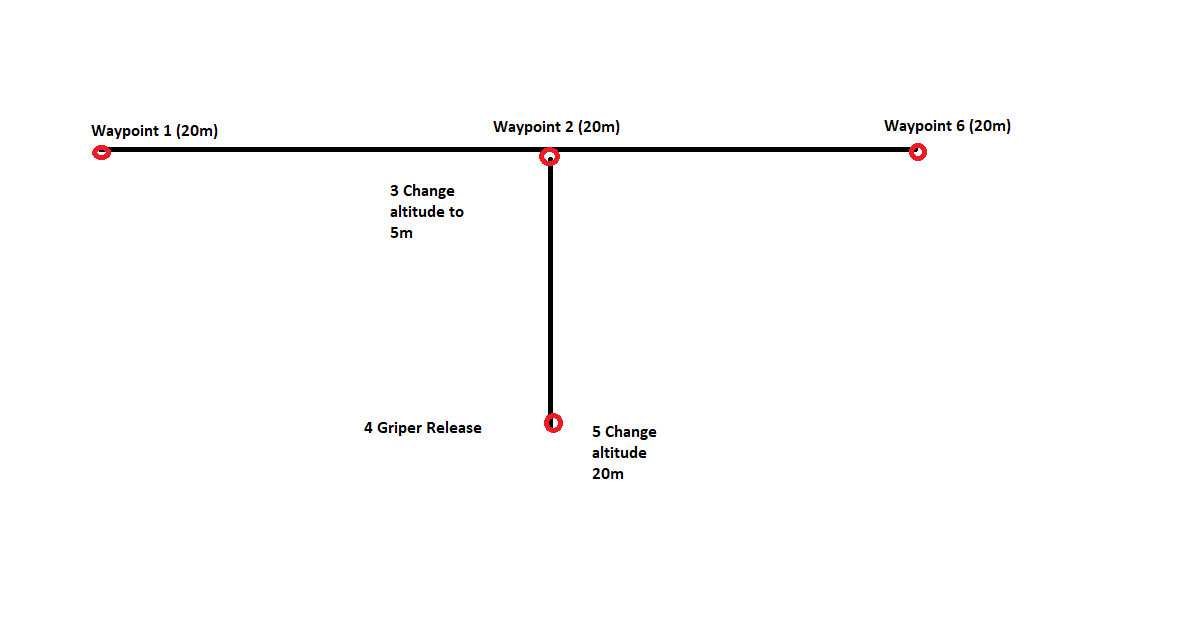
My goal is to reach waypoint 1 at 20 m, then go to waypoint 2 at 20m too. There is an mission item called altitude change, I want to use it to descend vertically to 5m then release the gripper and go back vertically to 20m and finally go to waypoint 6.
However, the changes of altitude are not working, the drone just stops ta waypoint 2 at 20m releases the payload and goes to waypoint 6.
Any help? Thank you in advance.