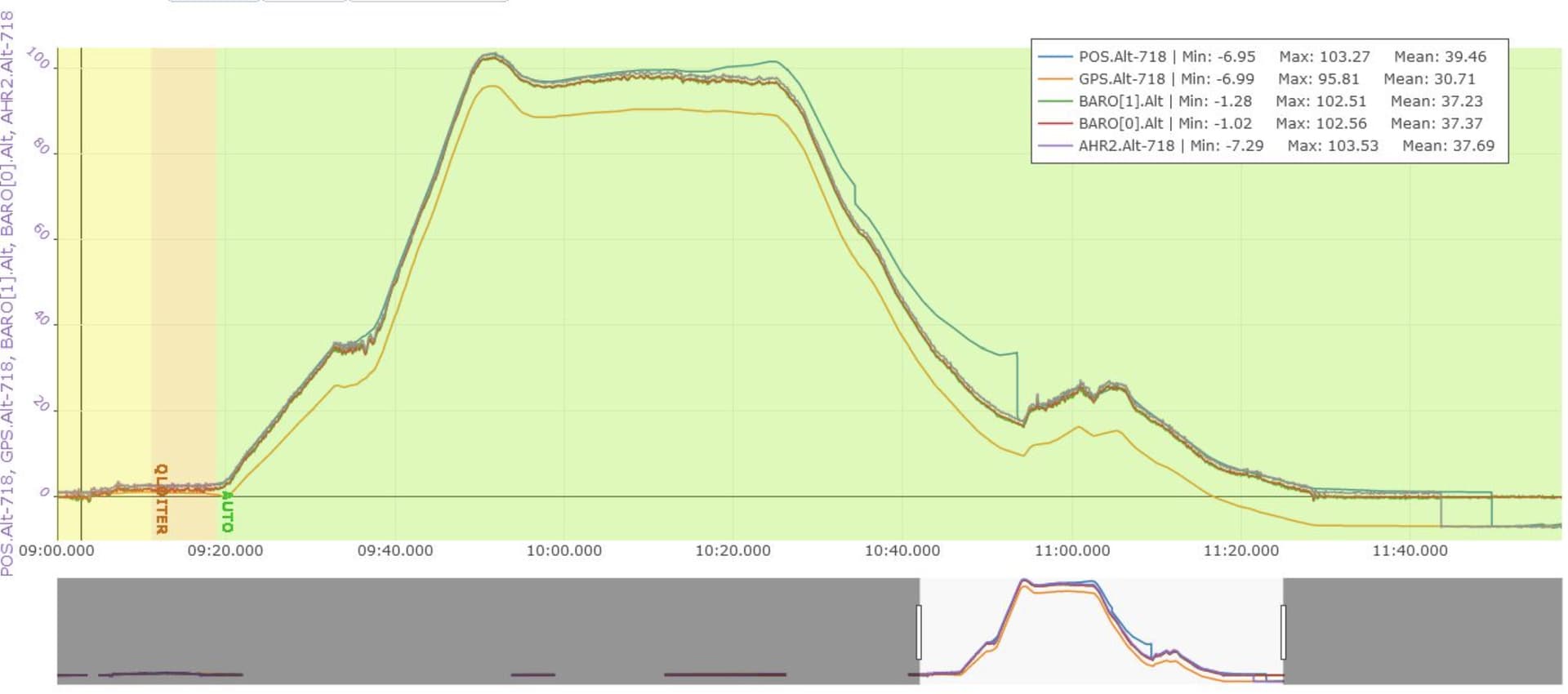
Recently I just build a Tricopter VTOL with FW 4.3.2. I have tune the VTOL PID on Q mode for the hover flight. Later I try to full auto mission and everything looking good on site. But when I review the flight log, I see some glitch in altitude which trigger my Q_ASSIST_ALT parameter (I set 20 m). I use QGC for the flight planning and set the VTOL to do loiter_to_altitude to 100 m after take-off transition, there are no issue on this. But when the drone loiter_to_altitude to descend which I set at 35 m before landing transition, the log shows there are significant altitude change which is not planned before. The drone descend until 17 meter height and trigger the Q_ASSIST before start transition for landing because the coordinate for landing is already reached. If not, I think the drone will start transition again. Here I attach my flight log and plan on QGC (version 4.2.4 download from Github). Please help reviewing my plan or parameter, I really don’t have any idea what happened.
https://drive.google.com/drive/folders/1kvFXY_WgS0v6AxLSNtiNvbrMjWdB7CUh?usp=share_link