I am using PixHwak 2.4.8 whenever i am switching it to AltHold mode it is failing to maintain it’s altitude what can i do now ?
I am also attaching log file here :
Another One :
I am using PixHwak 2.4.8 whenever i am switching it to AltHold mode it is failing to maintain it’s altitude what can i do now ?
I am also attaching log file here :
Another One :
And what Frame does it have? Post a photo of the craft.
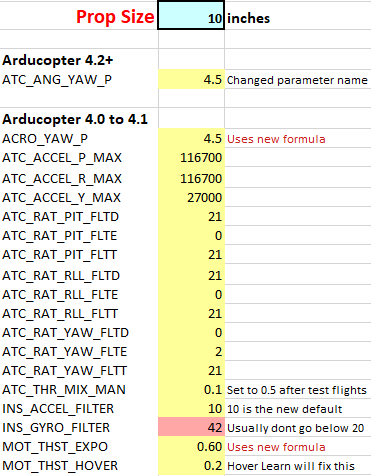
sunnysky X2212 V3 980KV and 10*4.5 propellor
can you post a photo of the machine?
the hexcopter has a variable reading in the barometer can it be the problem or is it something else
shpuld i change
ATC_THR_MIX_MAN 0.1
and what should be value of atc_thr_mix_min and atc_thr_mix_max?
The problem is those cheap propellers, they are never balanced and usually bent.
Spin each one and see if the blade tips are level, you might be able to remount them to reduce the vibrations.
Are the propellers centre on the motor shaft? they should be a close fit. I think those propellers come with spacers.
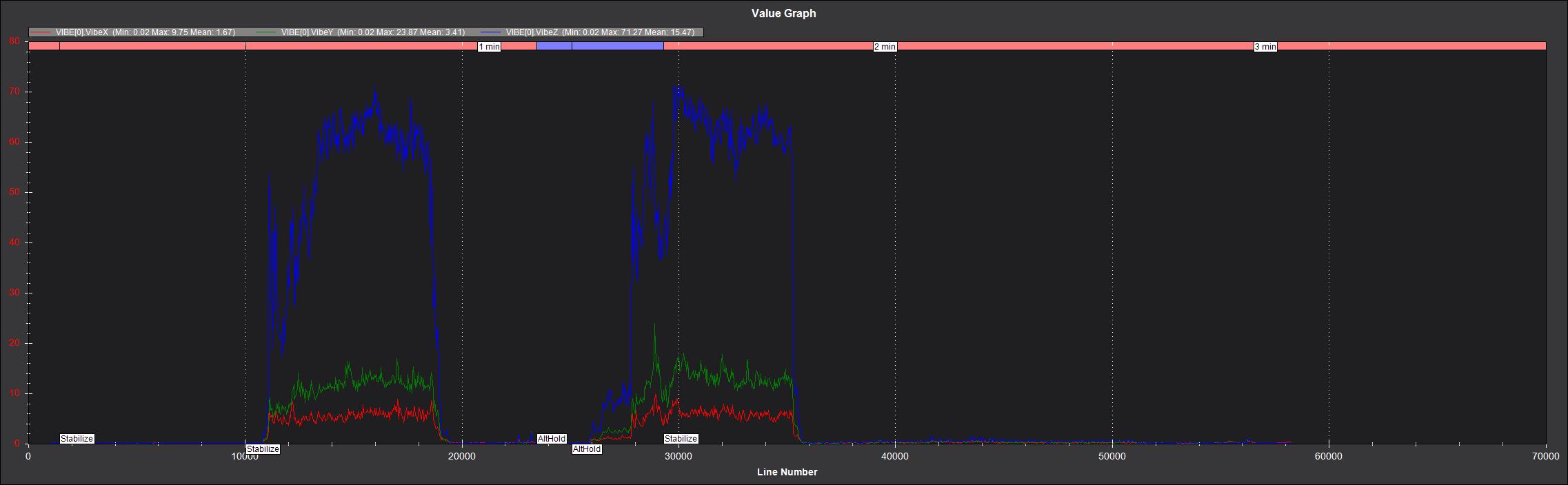
Concentrate on reducing the vibe levels before doing anything eles. Z-vibes in the 70’s and clipping is a non-starter. Check and balance the props as @geofrancis said. Also, that landing gear can be a source and how you have secured the battery. How is that Flight Controller mounted to the frame? Can’t tell from the photo.
Current isn’t logging correctly either.
MOT_PWM_TYPE,1 OneShot There is little advantage for using this protocol over regular PWM.
from the photo, I did not see the second GPS. GPS_TYPE2,2 (uBlox), CAN_P2_DRIVER,1
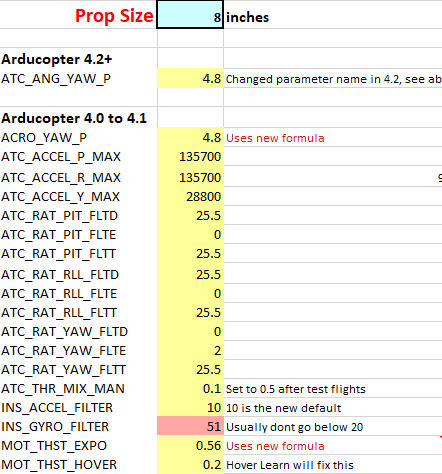
You seem like you are not using the correct 10" initial parameters.
LOG_DISARMED,0, if not needed.
Besides the high vibrations pointed out by others, I suggest you try to follow this guide.
Do make sure the propeller nuts are tight enough to prevent the propeller from slipping especially if you are using the non-self-lock prop nut.