Hi there, the flight started with Stabilize mode, we observed strange takeoff which copter wobbled and adjusted its attitude subsequently. It was drifting without pilot command and there was no wind impacting the quad. Then pilot changed the mode to AltHold and it seemed like copter did not respond and suddenly fell down. I have some log pics,
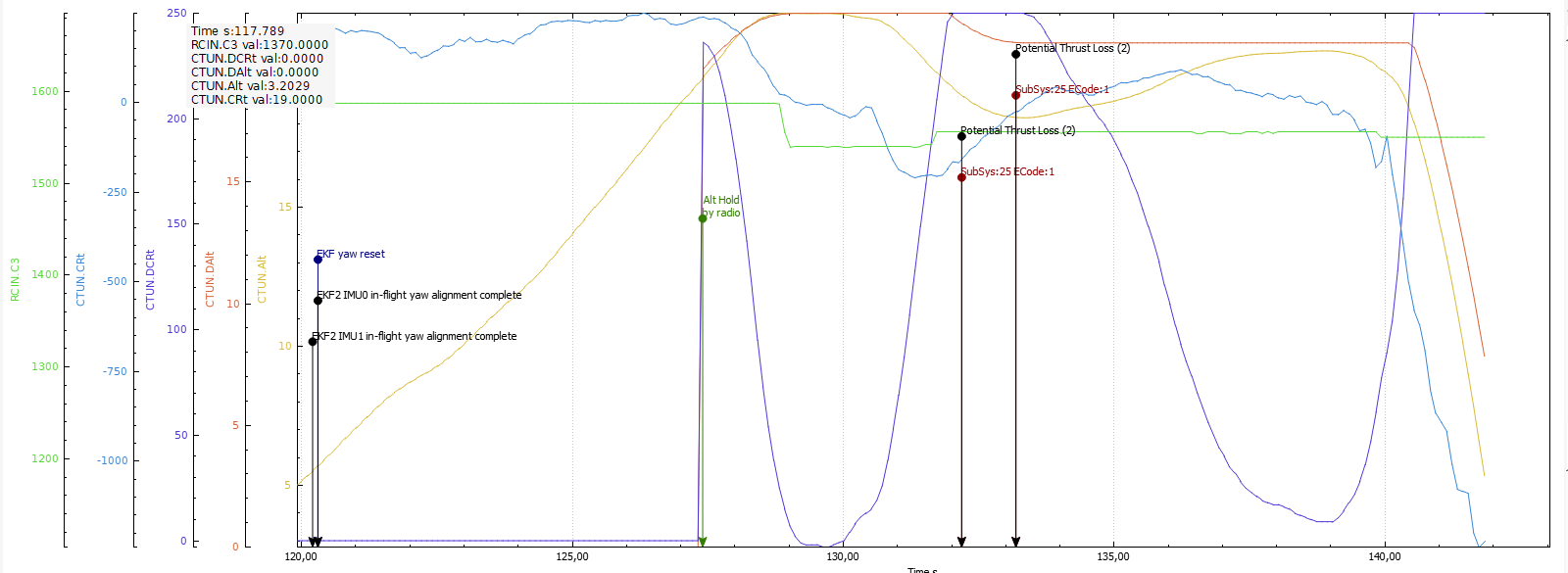
Here I see small difference in RCIN3 aka throttle channel but its in the mid-throttle deadzone which copter must maintain the altitude. Even though its in the mid-throttle deadzone, DAlt is increasing with EKF altitude and meanwhile DCrt is descending first and increasing abruptly?
The most strange thing is EKF altitude actually follow DAlt even there is no such pilot command to descend. In this pic nothing is correct, but for no reason. Please give me insights!
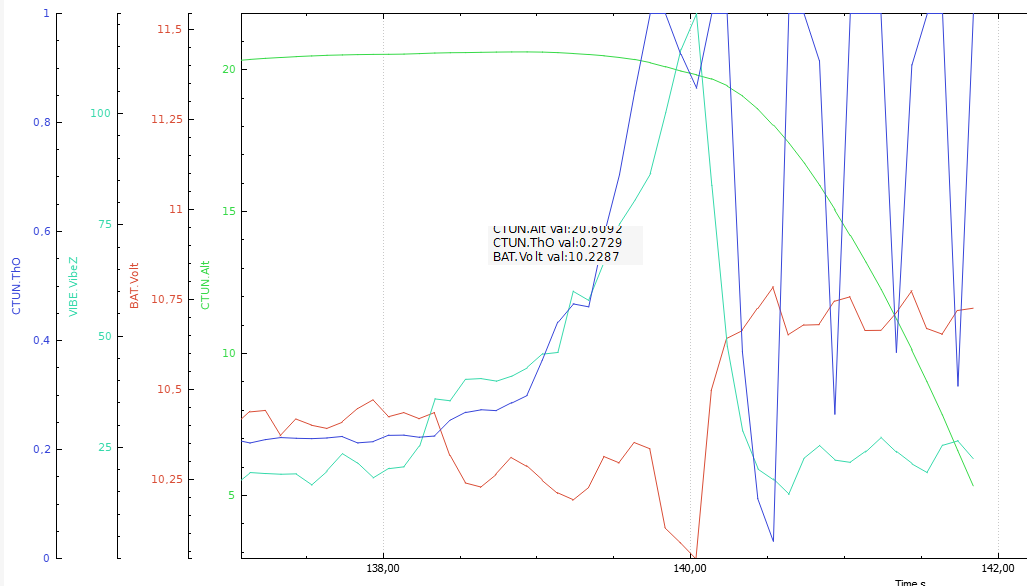
Another graph is CTUN.ThO, Vbat, VibeZ and EKF Altitude, weird throttle channel going up and down very quickly with the Vibe attack. Simultaneously, I see Vbat jumping +0.7V.
First, Is it ok to drop to 10V level for 3S battery during flight?
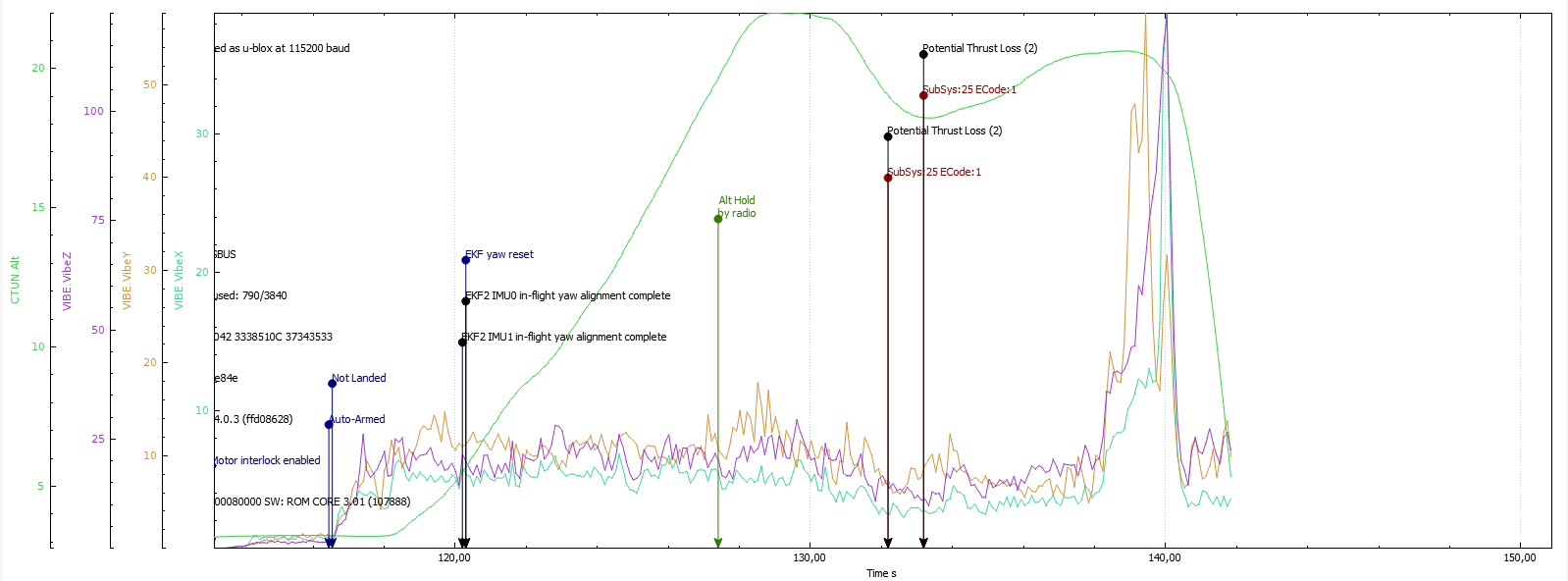
Second, could it be one of the motor/esc stopped working and it actually increases the vibration. Sharp increase in Vbat made me think that.
Graph the RC Outputs. Motor 1 was commanded to max for much of that flight. I would suspect a hardware problem. ESC, motor, prop. Then Motor 2 was driven to the max and Motor one low and it went down from thrust lost.
I checked and observed most of the time RCOUT1 is very close to max rather than others. RC Outputs are commanded by Pixhawk? Isn’t it Pixhawk’s fault? But it must be related to pilot inputs, I guess. That motor behaviour does not make sense to me
When one of the motors, or esc fails for any reason there is no thrust on that side and AP sense it so it commands that motor to work harder and occasionaly max out the output and lowers on the opposite side. Thats why Dave wrote to check the esc/motor combination for failure.
I will check if any of the motor/esc does work properly or not.
What might be the reason of sudden vibrations? If one of the motors stopped working, does that lead to vibrations?
And unsatisfied motor thrust on one side will lead to drift anyway, right?
Yes, with loss of thrust the FC will attempt to stabilize the craft and high vibration can result. As Igor pointed out when a loss of thrust is experienced on one motor the opposite arm will have to drop thrust also to maintain stability. Then you have a general loss of thrust and on quads it’'s insufficient to maintain flight. Down she goes…