Hello! A trying to tune a quad: 2600g ToW, 18 inch props, Pixhawk 1 FC,
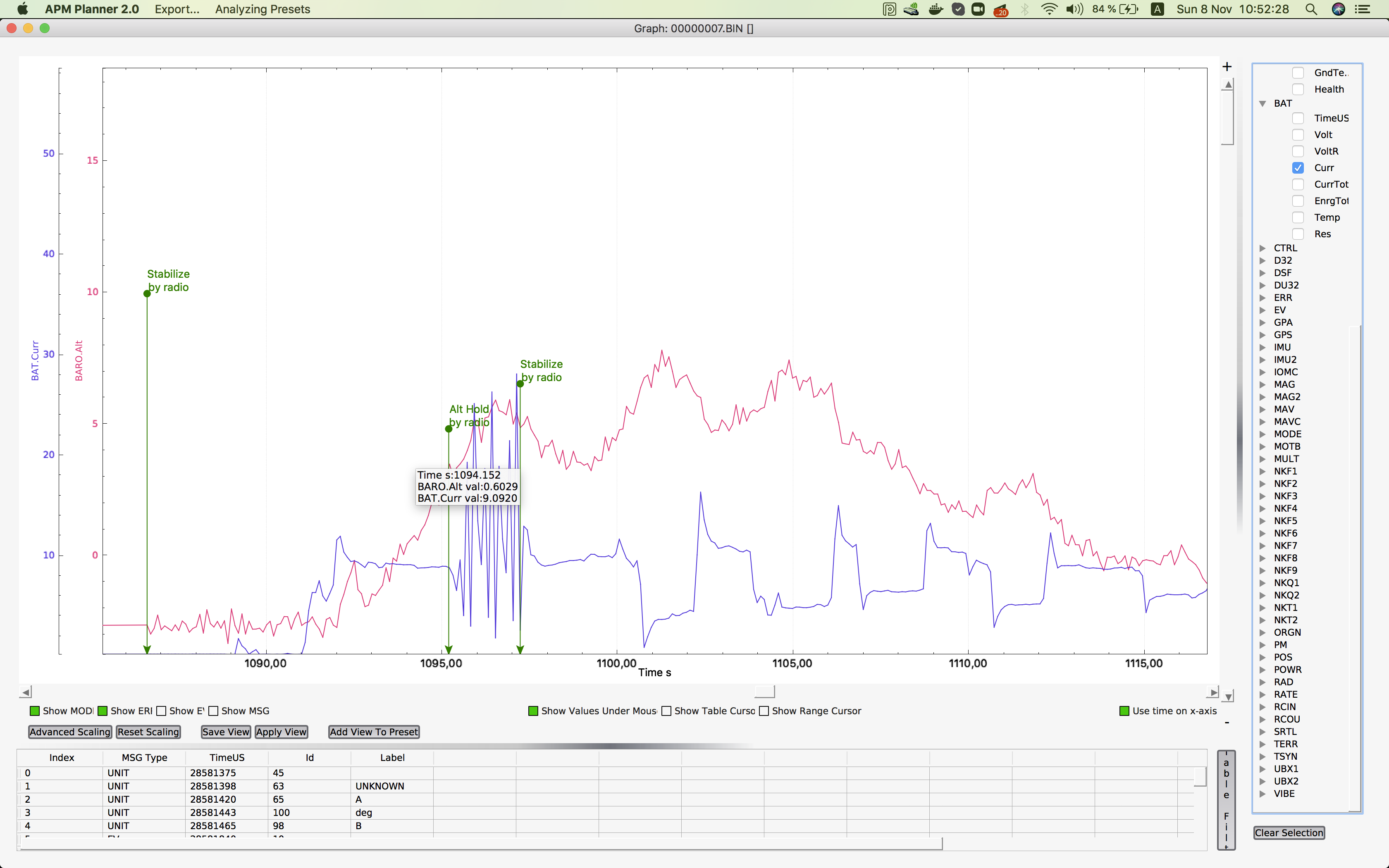
I tuned PID an it flyable in STABILIZE mode, but when i switching in AltHold quad starts aggressive thrust changes and loses stability. All settings is default except PID
Those PID values don’t look good. You have Rate pitch and roll I 2X P. These are typically equal. I would reset to default and follow this guide, then do an autotune: https://ardupilot.org/copter/docs/tuning-process-instructions.html
Or from the latest version of Mission Planner Alt>A and use the tuning plug-in.
Thanks for the answer! Yes, PID is not perfect but quad was stable and responsive in STAB mode, problems was in AltHold. I will try this guide after reassemble a frame