Hello All, this question maybe MOOT by the time Firmware 3.2 is released (because as i understand it, taking off in ALT HOLD & LOITER will be the same as Taking Off in Stabilize) but i will ask anyway.
I am Currently having a throttle problem in ALT HOLD and LOITER. In Stabilize, My THR_MID is 400, i think the Log Shows that to be true, thats what it was yesterday any way. I am trying to increase my ALT HOLD PID and LOITER PID because in my Mind that may stop the Descending behavior even though my Throttle is at 50% when it happens.
The Quad has been Auto Tuned.
what i hear from the motors sounds like a REVVING sound as it tries to maintain altitude. Attached is my Log, Am i on the Right track here?
Do you hear motors pulsing when switch to althold - loiter ?
How is positioned your FC on the frame ? Do you use foam, moongel etc. ?
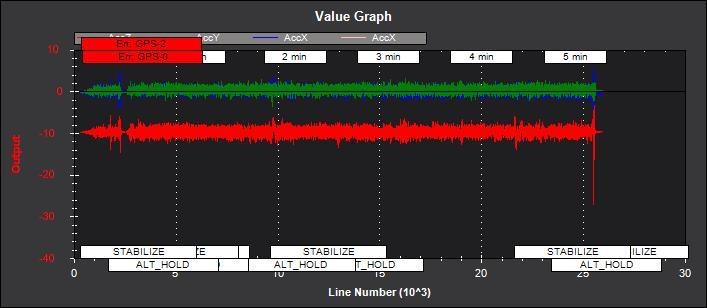
you have two GPS error in your log also (GPS-2 and GPS-0) but I don’t think they have to do with your problem.
Hi Thanks for answering. I was pretty sure my vibrations were with in limits, i believe on the X & Y its Up to 3 on the scale and Up to 15 on the Z Axis. My X/Y hovers around +/-3 and my Z Axis hovers around -8 to -9
On this Quad i am using Two Layers of Foam, other Quads i switched over to Kyosho Vibration Absorption Sheet.
from other vibration graphs i have seen i think thats pretty much the norm, infact the link you provided, which was very helpful, shows or looks similar to my vibration graph for this quad.
I am more thinking i Need to adjust a PID some where.
As Far as the Motors pulsing, yes i do hear that, my flight controller is dead center on the quad
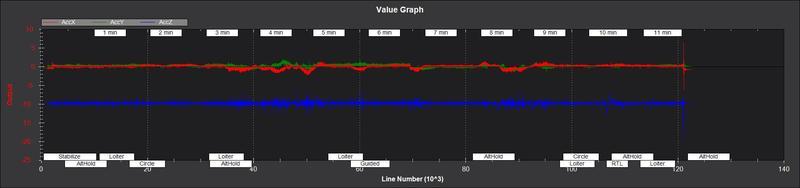
My personal opinion, that the current “wiki vibration range”, is good for old release (2.9 etc) but is not enough good for current release, where “inertial” need very very less vibration for works good.
Last year I had issue similar and I saw a graph of vibration very similar to yours that seemed good, “in the range”, but I had very issue in alt hold and loiter, the altitude was very bad with motor pulsing.
when I flew in stabilize all was OK.
After that I was able to reduce vibration, the problem disappeared.
If you want to try to reduce vibration with your current setup try to change Thorttle_accel_P to 0.5000 (default 0.7500) and Thorttle Accel_I to 1.0000 (default 1.5000) and report here please. (and back Altitude_hold to default 1.0000)
Thanks a lot Giuseppe I will certainly try that out and see if anything improves. I am surprised documentation is dated but i would hope they would update it with new parameters. i didnt expect it to be a vibration problem.
i guess over all throttle adjustment will help both ALT HOLD and LOITER?
Just waiting on Winds in Florida. been windy for the past few days and i cant put anything up in the air, we’re gusting to 25 mph steady state 10-15 mph. not great for testing. According to forecasts, winds wont settle down til Next week. i’ll Be back!!
ok i have taken alot of time to look over the Quad and have switched out my anti-vibration methods. i am Now Using this ebay.com/itm/151276218358?ss … 1439.l2649 on All my Quads. i believe it has much improved my ALT HOLD / LOITER problems. I will find out more probably tomorrow after making a fresh swap on a second quad today. My First Quad i made the Change on seems to behave very nicely with firmware 3.1.1
I also Moved during this process from one side of florida to the other, sorry for the delay in getting back to anyone.
:mrgreen: