Hi! First thanks for taking a look at this thread; I’m hoping someone can lend me a hand.
I had a crash with a 250 sized quad - after replacing a prop, GPS mast & gps+i2c cables and loading up a new battery, manual (stabalize mode) flight is totally fine… but if I switch to alt hold, the copter just bounces up and down, loosing altitude until it hits the ground.
I’ve tried:
-replacing APM with a verified working one from another copter
-replacing power module
-reflashing firmware
-visually inspected ESC’s, all soldered connections and wires
-tried to fly with both telemetry & osd unplugged
And every time, switching to alt-hold just causes the copter to bounce. I am not using any ‘cloned’ hardware; all from 3DR.
I really don’t know what else to do… I have my fingers crossed that one of you can see something I’m not from these logs. Any help would be greatly appreciated!
You have a slow correction. Play with your PID gains. start by a lower P value.
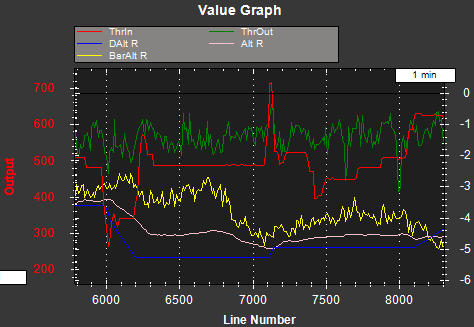
For this slow descent increase your THR_MID to 550. that’s according to your ThrOut
Also try to cover your baro with foam. it helps against prop wash.
thanks for the reply - i’ll try messing with my loiter PIDs some more but it’s hard to imagine they are to blame. The thing is, before the crash alt-hold worked flawlessly - i did not change any parameters.
[quote=“kafteji”]Why do you move the throttle stick while in AltHold mode (red line) ? it is supposed to maintain the altitude if your stick is within 40-60%
even though I still believe your P correction is very slow,
[/quote]
I have to move my throttle stick while in althold because the copter is bouncing up and down… so I have to put the throttle all the way down when the copter shooting up into the sky, otherwise it’ll keep going to space; and the opposite when the copter is getting close to the floor (i throttle up so it doesn’t hit the floor). I’m trying to stay in althold as long as I can to gather data…
When you say the P correction is very slow, what parameters specifically should I be modifying?
you’re freaking out I think ! So if you are at mid throttle and the altitude changes too much that means the barometer readings are not correct. It’s the main instrument for AltHold mode. did you cover the barometer with foam ? Could be simply a fault unit.
Try to fly higher ! Some weather conditions affect the readings below 20 ft
[quote=“kafteji”] you’re freaking out I think ! So if you are at mid throttle and the altitude changes too much that means the barometer readings are not correct. It’s the main instrument for AltHold mode. did you cover the barometer with foam ? Could be simply a fault unit.
Try to fly higher ! Some weather conditions affect the readings below 20 ft[/quote]
ha I wish I was just freaking out. I’m telling you this thing used to be solid even 5-10 feet off the ground. Yep the baro covered with foam, and I’ve tried two separate APM’s on this quad and the behavior is the same

 [/quote]
[/quote]
