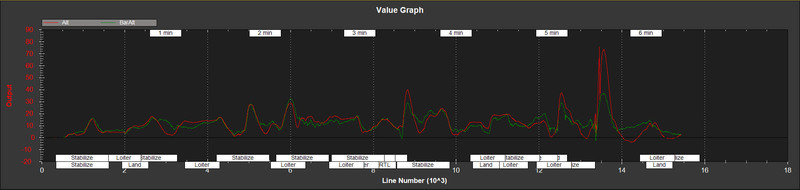
Hi all! I will keep this short! I’m using an APM 2.6 and a ublox M8N witch compass. No more equipment right like sonar or anything. Why wont the BarAlt and Alt (I guess that “Alt” is Altitude given by the M8N?) track as they should?
My quad flies great in Stabilize mode, but when I go into Loiter it seems to crazy as it kind of throttles up very rapidly, but then almost instantly cuts the throttle, and then after 1/4 a second it spikes the throttle again, and then cuts it, and so on, if that makes sense.
When I try the Auto Log Analyzer in MP everything seems good except for the compass. It says “GOOD - No MAG data, unable to test mag_field interference”. But I can calibrate the magnetometer and everything so I don’t know what could be wrong here?
[quote=“RabbitStu”]My guess is vibrations but hard to say without the IMU enabled in the log to check.
you don’t have mag enabled in the log so the auto checker can;t check that data…that is what that message means.[/quote]
Thank you very much for your answer RabbitStu! I’m pretty sure that it’s not vibrations as I have very high quality RCMC 3407 motors and pretty well balanced props, but I will surely put my extreme vibration dampener thing with those “rubber balls” just to see if it makes a difference.
How do I enable the IMU to be logged now when the terminal does not work on the APM anymore? I can’t find any information on how to enable and disable things to be logged without doing it in the terminal (which does not work)!
I’d also say it’s a vibration issue. If your BarAlt and RelAlt don’t track then that’s a problem. RelAlt figures its altitude based upon a combo of barometric and accelerometer data, so if they aren’t the same probably a high Z axis vibration. You might turn on your IMU logging and check for sure.
Thanks a lot guys! As soon as the rain and wind goes away here in Stockholm I will fly it with the IMU enabled and with my APM mounted on the cheap vibration dampening platform that I got on ebay and we will see if vibration is the cause of this!
I don’t know if the following question may have to do with this problem, but anyway; my quad is pretty powerful for being only 1.9kg, so the hover throttle is about 35-40% on my throttle stick. My question is, should I go into the settings and change the hover throttle percentage setting from 50% to 40% to have the loiter working as it should? I mean, I guess that my quad now thinks that it has to give 50% throttle to have it hover, and there must be an error (the quad rises) for the APM to understand that 50% throttle is too much, if that makes sense. That would mean that every time I go into loiter, the APM must give 50% throttle, then get info that the quad rises, then lower the throttle until the quad just hovers, and then it will loiter. Or am I thinking completely wrong here? Do I need to change this setting from 50% to 40%?
Yes, precisely that. Your THR_MID should be set to whatever your actual hover throttle percentage is. That way when your throttle stick is placed at mid range your craft should hold a constant altitude. I usually do this as part of the very first test flight of a new multicopter, find the hover percentage and set it.
You probably still have vibration issues, but this will exacerbate them. BTW, just because a mount is designed to reduce vibration that doesn’t mean it will. One of the best, proven things for APM 2.* vibration reduction is to mount it on four squares of Kyosho Zeal, or if not available, perhaps Moon gel.
{kind=link}