Hi all,

Just reading this interesting publication and was simply asking if it was possible to imagine a module that can interact between Ardupilot and a 2 legs or multilegs robot.
We have already Rover, that can allows to pilot different wheel based or even tank based robots.
Everything we need is to manage stability in a different way (this is already done with the FC algorithms)
The goal is not to create a full operational code for piloting a “standard” (to be defined) robot, but just maybe a basic interface allowing to do the link with another opensource robot project.
In theory, seems to be simple as this: 
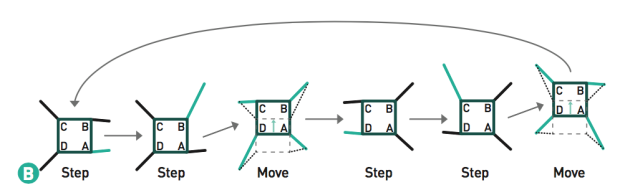
void loop() {
//STARTING POSITION
Set_Leg_Position_0Cartes(‘A’, 50,10,down);
Set_Leg_Position_0Cartes(‘B’, 50, -10,down);
Set_Leg_Position_0Cartes(‘C’, -50,50,down);
Set_Leg_Position_0Cartes(‘D’, -50, -50,down);
//STEP 1
Step_in_Y(‘B’, -10,110);
//SHIFT1
Move_in_Y(‘A’, 10,-50);
Move_in_Y(‘B’, 110,50);
Move_in_Y(‘C’, 50,-10);
Move_in_Y(‘D’, -50,-110);
//STEP 2
Step_in_Y(‘D’, -110,10);
//STEP 3
Step_in_Y(‘C’, -10,110);
//SHIFT1
Move_in_Y(‘A’, -50,-110);
Move_in_Y(‘B’, 50,-10);
Move_in_Y(‘C’, 110,50);
Move_in_Y(‘D’, 10,-50);
//STEP 4
Step_in_Y(‘A’, -110,10);
}
I totally agree if someone tells me that this is out of the strategic scope of Ardupilot. This blog is just to open the discussion
Some interresting links:
{kind=link}