Hi,
As CM4 comes with nice features like, built in wifi, mmc and small form factor,
I recently started to work on a small size all in one autopilot for Ardupilot with CM4 connection as companion computer. As I am in the beginning of the project, I am looking for your feedbacks / ideas to make the project a really cool mini autopilot with all in one logic
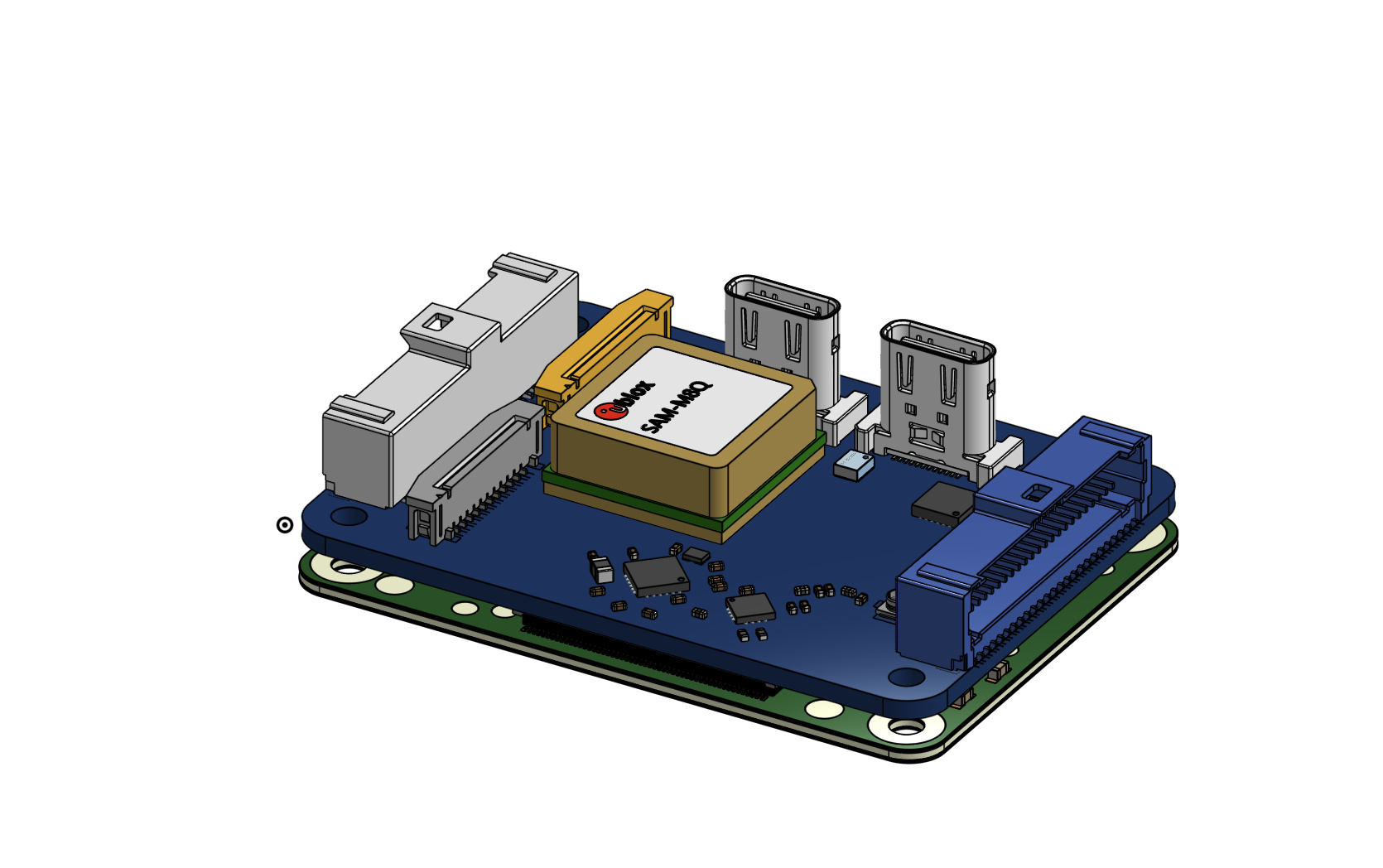
Board includes:
STM32H7 microcontroller to run Ardupilot
GPS ublox m8q
2.4Ghz telemetry module ZOON
CM4 connection ( note will be only for cm4 with built in MMC, doesn’t have SD card holder )
I used High dense Molex connector for Pinouts from CM4 and also Outputs from SMT32 microcontroller to connect additional pheriperials if needed.
I used additional USB connector for CM4 to upload the OS inside MMC.
2 x Camera connectors from CM4
Main goal of this project , all in one autopilot is to turn any airframe into a drone with minimum components., to remove the messy cabling, and to save space and weight.
As mentioned by @khancyr. The idea to put the GPS module in the center of a rats nest of wires will give very poor GPS performance. It was already tried and abandoned that way in 2011.
Yes, I have seen, my project is a little bit different, all-in- one and size is same as CM4 , Also I haven’t used Google Edge TPU ( I don’t have any experience with it)
Problem is generally related to USB3 that generates a lot of noise in the GSM Band, I guess that CAN should be the preferred transport in this configuration.
Can do a lot of interesting stuff with TPU, only drawback is the neccessity to downgrade TensorFlow to a lesser efficient framework in order to fit into the Edge chip.
ML chip maybe on next versions, currenty complicated for me, it is BGA chip (significantly increase manufacturing cost for low volume production) and also never used,dont have any experience with it, also not sure if the google is going to produce this for a long time. We will see later how the Ardupilot community moves.
am aware of standard pix hawk connectors, but they are old standards. Also doesn’t have to much space on pcb, I have already tested these molex connectors they are super cool connectors.
Using this connector can make great integrations, providing you use high quality siicon cables, otherwise it could end-up as a conductor for mechanical vibration that may be tricky to tune with the notch filter.
May I suggest you offer an externally connected expansion board connected to the Pico-Clasp to expose the basic PWM - Serial - I2C - RCIn so making it easier for the consumer acceptance.
Hi, looks quite nice, GPS location is ok and it works very well for wixed wing plane where compass is not required but now a days compass comes integrated in the GPS module, which is surely going to create big trouble with present design.
Ethernet port (let it be a simple 4 pin CAN line connector for the eternet without transformer module) for IP Camera is required, its used for HD FPV.
One CSI cam, you gave option for two, thats fine. Let there be three USB2.0 ports options (just use 4 pin CAN type connector, people prefer to use such connectors even for USB cams as they are very small and tight connections). One USB could be used for .h264 1080p camera + one USB port for thermal camera (Hti301 like) + one USB port for amplified USB-WiFi adapter (like Asus AC56). You have to keep the +5V of the USB’s just separate feed from switching regulator 5V, 5Amp.
Looking cool! What EDA are you using? I’m a software developer thinking about doing some extension boards and one for CM4 is on my plans. Mine I think will be a little different (and simpler) since my main motivation is to run ArduPilot on Linux and teach myself how to design a board with kicad. Do you plan to opensource your design?