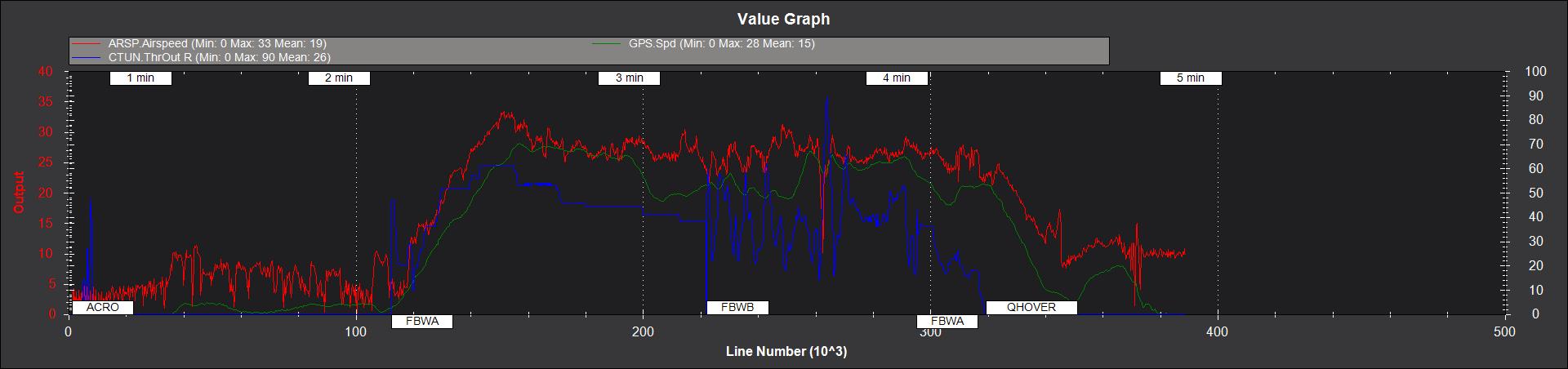
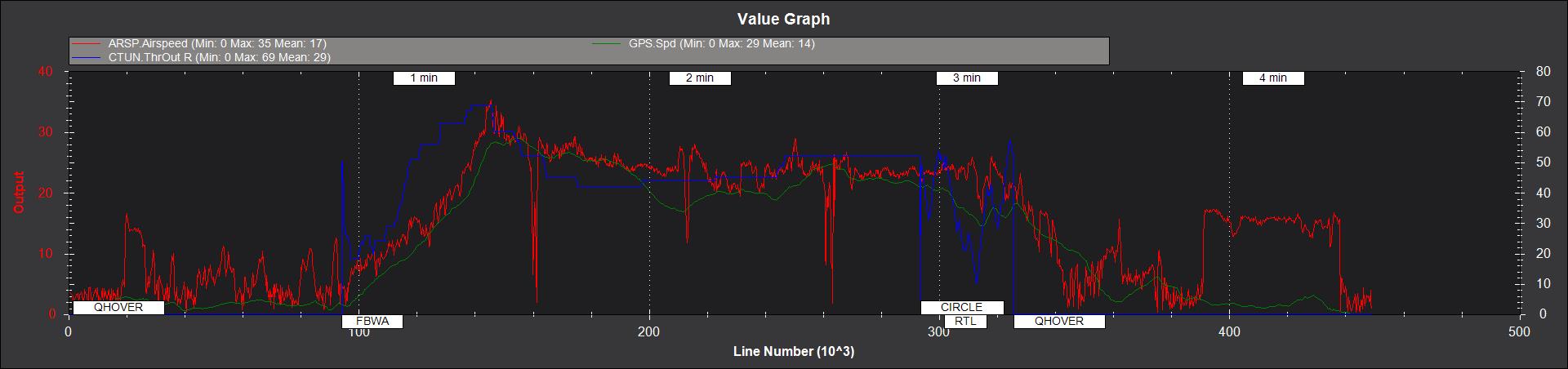
I have just started flying in FBWB mode in an effort to test altitude and airspeed control before conducting a full way-point mission. My airspeed sensor seems to be having some fits though, I’ve conducted several bench tests attempting to adjust the ratio and offsets to get an accurate reading which all seemed to work. In general, the sensor is working, however during the last three flights I am noticing some very erratic behavior and of course while attempting to fly in FBWB mode the throttle controller is all over the place because of this. I have tried adjusting the TECS_THR_Damp and THR_SLEW_Rate with no change.
in general, the ratio is done once either manually or automatically. The offset is done before flight, sometimes even every flight. “Offset” is the zero-ing of the data… so that should never be done during flight.
Yes, I have followed the wiki. I adjusted the ratio on the bench in a mock up “wind tunnel” and compared to flight data. The calibration is done before each flight with a pitot tube cover in place. I have not tried the in flight airspeed ratio calibration yet as per the wiki. My question is why am I seeing the erratic drops from 25 m/s to 0 and so much noise. This is causing the throttle controller to over react in auto flight modes.
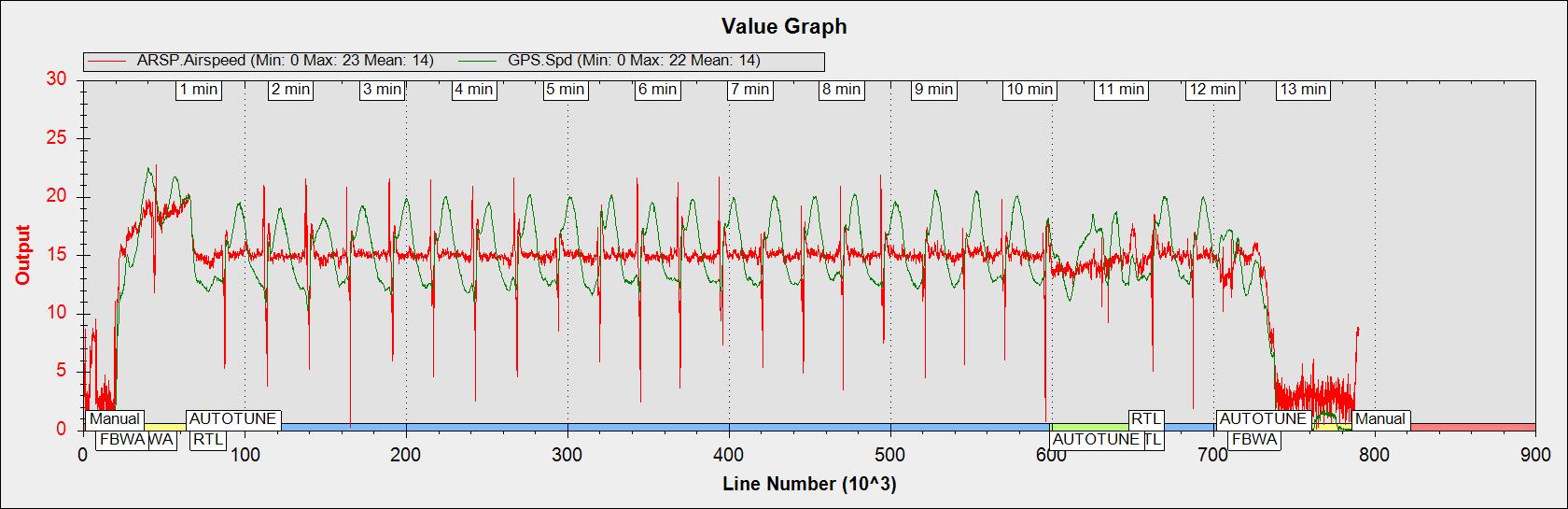
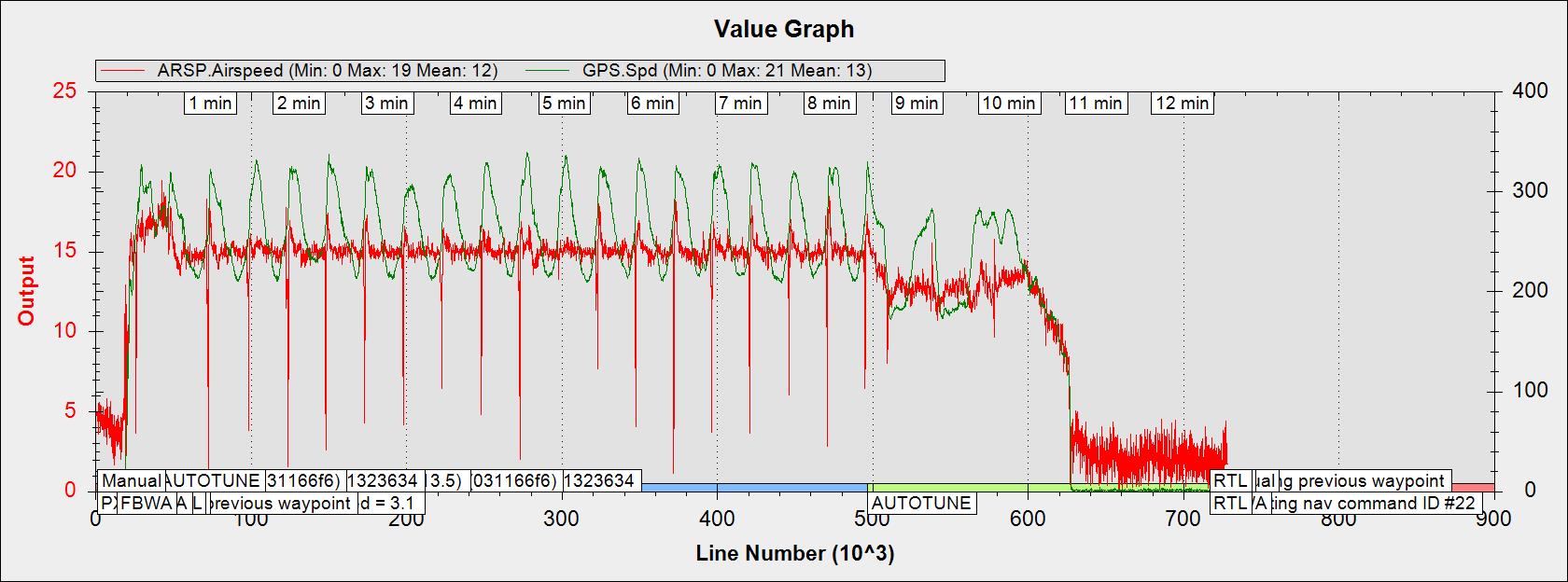
I have a similar problem with my Zeta fx 61 running 3.8 on a pixracer clone. The airspeed sensor is a digital connected The measured speed of the airspeed sensor drops every time the plane turns into the wind. I tried to change the position of the pitot tube more to the nose with no effect.
The speed measurement is very precise - so why does the reading drop?
I have the sensor connected by soldering it to the wires to the gps/compass module, because the pixracer has no second I2C-port
These are the Parameters I use:
ARSPD_AUTOCAL 0
ARSPD_BUS 1
ARSPD_FBW_MAX 22
ARSPD_FBW_MIN 7
ARSPD_OFFSET 31.96862
ARSPD_PIN 15
ARSPD_PSI_RANGE 1
ARSPD_RATIO 1.9936
ARSPD_SKIP_CAL 0
ARSPD_TUBE_ORDER 2
ARSPD_TYPE 1
ARSPD_USE 1
I did the recommended calibration by covering the sensor at boot time and set ARSPD_AUTOCAL to 1 for a calibration flight.
As I wrote, the airspeed measurement is quite good, exept of the drops when the plane turns into the wind.