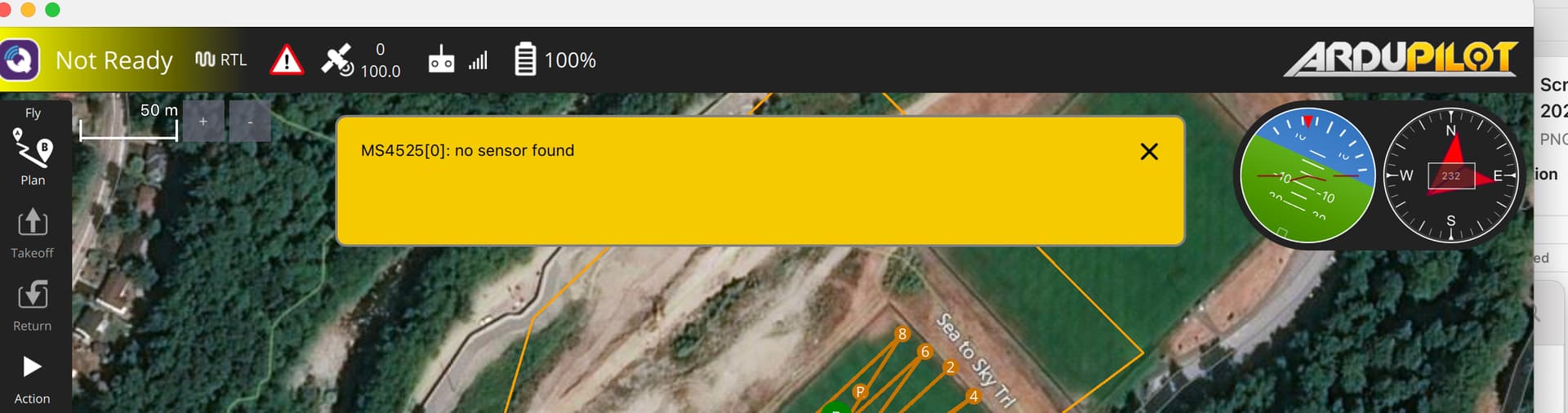
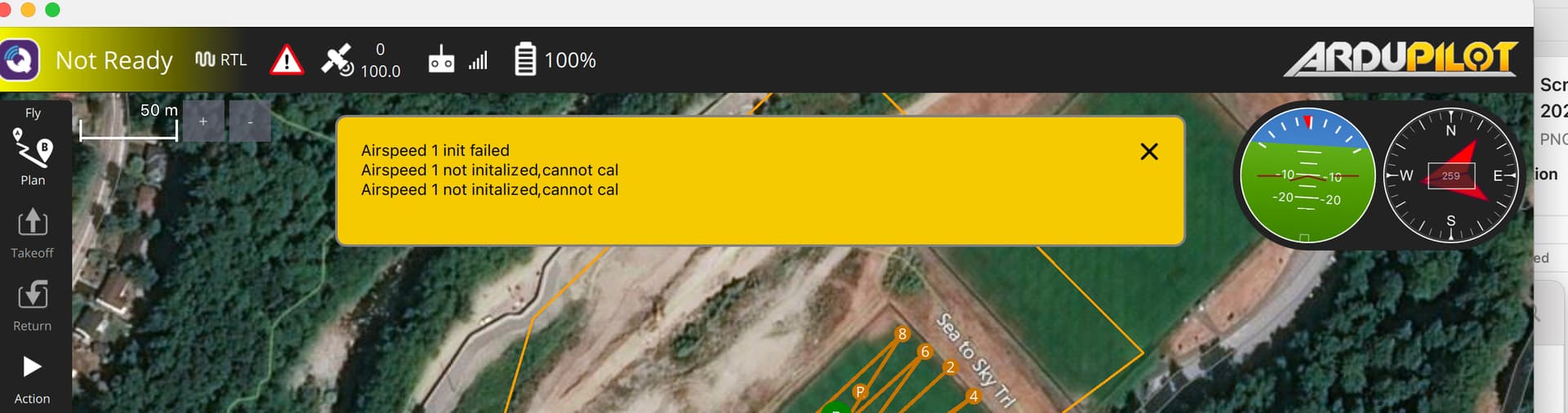
I have a PixHawk1-1M in a plane. I’ve put a build from master on the plane and every time I boot and connect with QGroundControl I get “MSG4525[0] No sensor found” messages and “Airspeed 1 init failed” and “AirSpeed 1 not initialized, cannot cal”.
I don’t get these errors with Mission Planner, but the errors also go away if I put 4.1.7 Stable on the plane, so it might have something to do with the ArduPlane code vs the QGroundControl code.
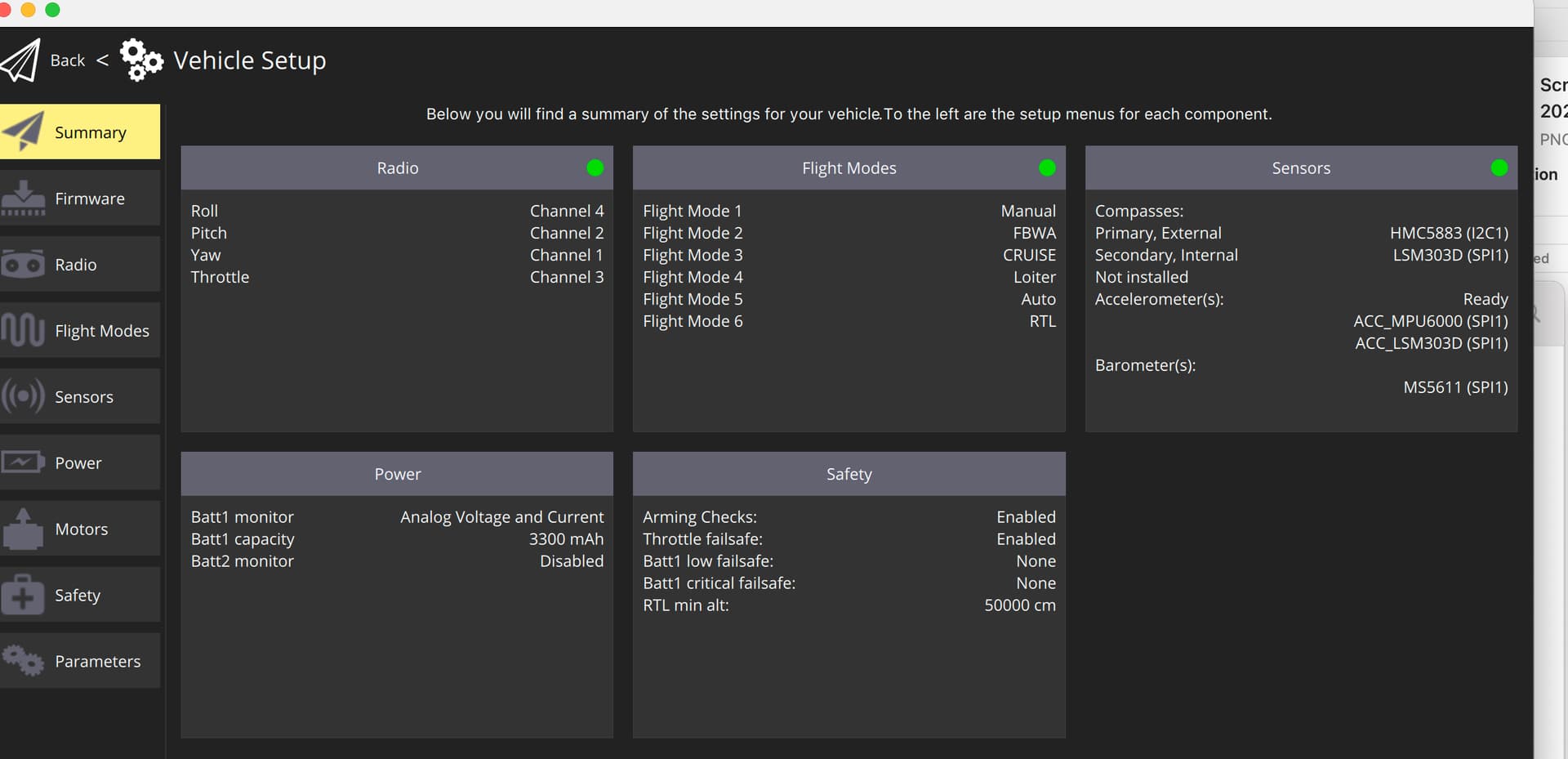
But I have no airspeed sensor. No airspeed sensor shows on the the Sensors page of the setup, so why am I getting this error?
All normal…prior to 4.2…GCS message would show “Airspeed calibration started”, but never finish if a sensor was selected, but not present…
4.2 sends a message that whatever type is selected is not found, and therefore no airspeed backend is initialized and that the later airspeed cal routine (right after BARO cal) cannot start because no backend is initialized…rather than just cal starts and never finishes…to avoid this, set the ARSPD_TYPE to none rather than the default value of the MS4525 as suggested in the wiki under the First Time Setup/Configuration/Airspeed section…
I’m a bit surprised that the default ARSPD_TYPE would be be MS4525. I reset the board when I installed it in this plane and I have never had an airspeed sensor in this build. Perhaps the default should be “None”?
But my most obvious suggestion would be that the messages need to be more meaningful and helpful. Especially the first message. After having a plane that flew well and worked fine through multiple releases (I think I started with 4.1.5), suddenly I get a message out of the blue that says “MS4525(0) no sensor found”, even though I didn’t change anything. It didn’t even say “no AIRSPEED sensor found”, actually to be consistent with the subsequent messages, and to make it clear that they are related, it should probably say “Airspeed 1 MS4525 sensor not found”
I’m also wondering why these error messages show up in QGC, but not in Mission Planner?
Airspeed sensor default has been that sensor for at least 5 years…not having an airspeed sensor present, when selected, has always been a “silent” failure (airspeed cal starts but never gives a message that it completes or fails), which was corrected in 4.2 …it falls back to synthetic estimate, but to make sure all features work, it should be set to NONE if not using it…the new clear warning is to make sure that users switch it to the correct one, or NONE, if not using it…Using an airspeed sensor in plane is the majority of use cases…
MP misses some early ground start messages because it requires manual connection unless its a UDP link…MAVProxy on a reboot , and QGC (on autoconnects) do not (actually QGC does miss a few early ones…but it autoconnects pretty fast)…
Thanks @hwurzburg for explaining that. I’d suggest that now the failure is no longer silent, perhaps it’s time to change the default then. If the airspeed sensor is optional, perhaps the default configuration should not be an error condition?
an airspeed sensor is recommended for plane, although not required…
the default condition for Copter is an error condition, for frame type…many examples of default generating errors if not properly setup during configuration…
you can fly a vehicle without even a GPS if setup properly, but no GPS results in numerous ground start errors by default…and the list goes on…