I recently had a stall issue on my Volantex Ranger EX QuadPlane without using an airspeed sensor in 15-18mph winds. The firmware was APM Plane v3.6.0. My suspicion is that the Q_ASSIST_SPEED may be a moving target when using only GPS speed because it doesn’t compensate for wind at your tail. You can read details of my latest quadplane test here in the Plane v3.6 forum.
My intention is to update the firmware to Plane v3.8.0 Beta 5 and add an analog air speed sensor. I would appreciate any advice on the following:
Would an airspeed sensor help a QuadPlane flying in FBWA mode?
Is a digital airspeed sensor significantly better than an analog version when using a Pixhawk?
precisely there helps a well-calibrated airspeedsensor. You know our tiltrotor VTOL called “Mozart”. Without airspeed sensor, we could fly forward transitions only against the wind. The wind direction does not matter with the sensor.
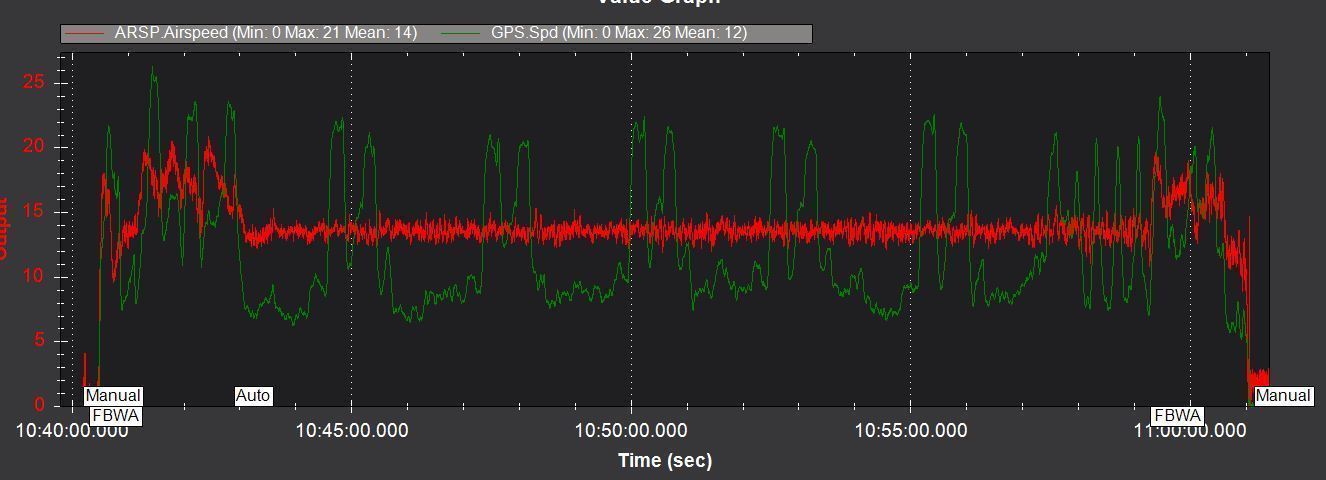
Here is an example of how exactly arduplane flies at 25 km/h wind and 48 km/h IAS with an airspeed sensor in automode: (pw = skyeye, ground speed and airspeed are displayed in the upper left window) https://vimeo.com/223652208
I recommend Jordi’s digital sensor with the newer ms5525 pressure sensor. The noise is much lower than the noise of the most used 4525DO: New Airspeed sensor (MS5525) for ArduPlane 3.8
The analog sensors in my experience on Pixhawk/Pixracer are less precise than the 4525DO. The cable is more susceptible to interference then the same length I2C.
But one thing has to be considered for all digital sensors on one I2C line:
If you have an external compass at the I2C, the data lines may have different voltages. Mixed 5 Volt/3,3 Volt leads to I2C errors.
At our VTOL “Mozart” , we avoided the problem by using no external compass. Otherwise one would have to take an active I2C hub eg http://www.auav.co/product-p/i2c-hub.htm
Thanks for the password. I missed it on your first post. Using the internal compass seems to work fine on the Pixhawk. I’ll have to check what my M8N GPS uses for compass I2C levels but using the internal Pixhawk compass is an elegant solution. I have tested this before on a copter and use the internal compass on the Antenna Tracker. I see that the Pixhawk I2C port supplies +5v and Gnd but uses pull-up resistors to 3.3v.
Looking at your video and your graph, I see the GPS speed changing with upwind and downwind passes while the actual airspeed is quite consistent. My assumption is that when an airspeed sensor is active on the Pixhawk, the Q_ASSIST_SPEED reads the airspeed sensor and not the GPS speed. Does this sound correct?
I am learning much about the airspeed sensor and really enjoy this part of the hobby. Below is a copy from charles_c from an older post. I have added what I have learned.
Advantages:
Better endurance, more flight out of your batteries
Better turns and altitude control in auto-throttle modes
Makes auto landings much easier
Reduces possibility of stall
Helps in windy conditions, slow flight, and autonomous landings
Disadvantages:
One more sensor to tune
One more part to break
Added cost
May conflict with external compass I2C (use internal compass)