Hello all,
I’m trying to find a reason why my plane crashes when flying without a GPS signal.
And I’ve found an issue similar to this topic
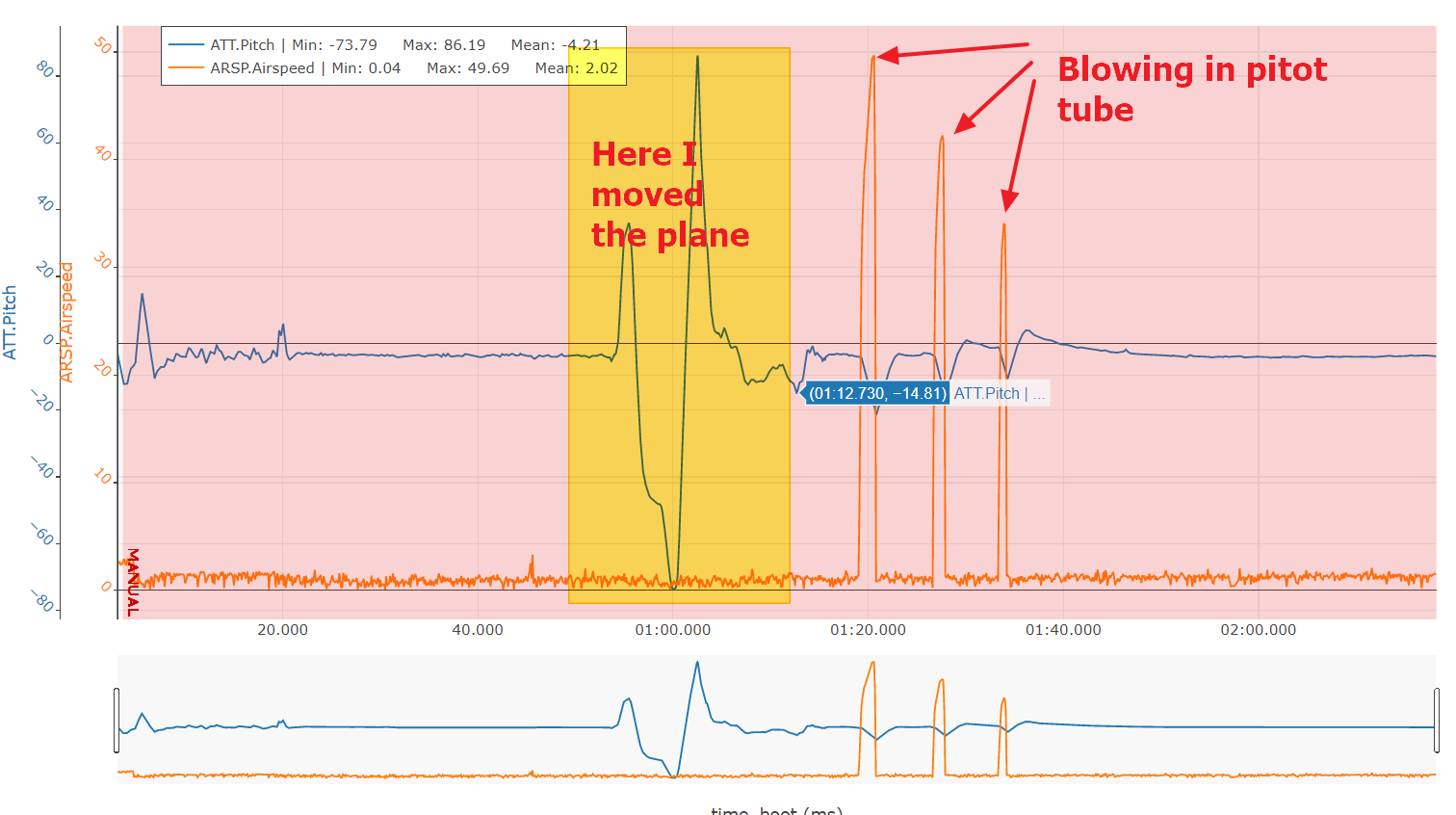
Shortly: if I blow on the airspeed sensor while the plane is on my table (without GPS lock) I see that the horizon on my GCS is moving like ±20°
TBH it looks like TECS compensating for increased (excessive) speed. Also your probe doesn’t look calibrated. From my experience simply blowing into the tube shouldn’t cause 50m/s spikes.
If you have GPS try flying circles with airspeed sensor enabled but not used and airspeed learning enabled.
Other than that check if your control surfaces move the correct way in Stabilize.
Yeah, I’ve started checking TECS, and found the same stuff:
ATT.Pitch is the value from DCM and it is logged directly inside DCM, so TECS will not affect this