Matex F765-Wing with a digital airspeed sensor. Pitot well clear of the slipstream.
I understand from the docs that airspeed can be expected to jump around. But this much? Shouldn’t the startup calibration attempt to change the Offset so that the airspeed is pretty close to 0? Outside air temp was -1C if it matters.
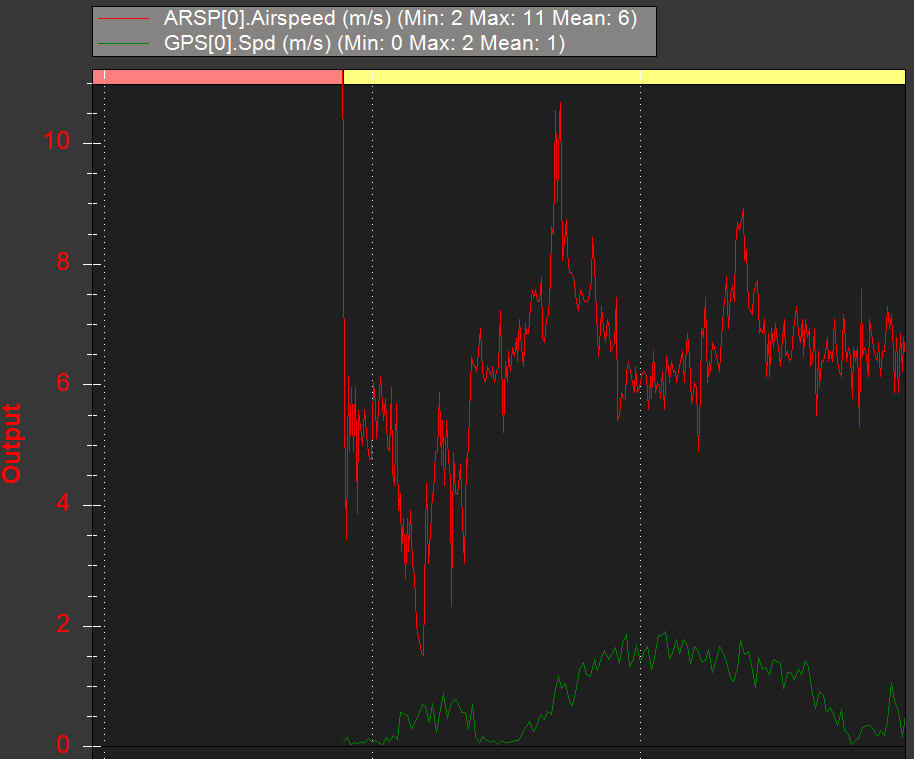
Airspeed readings while on the ground, after startup calibration, just walking the plane from the parking lot to the field for launch:
The nature of a square root dependency relates to significant changes especially near zero airspeed.
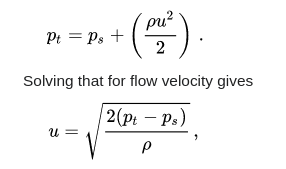
Put some numbers in the formula above results in
v = sqrt (2*14Pa/1.225gk/m**3) = 4.78 m/s
You can try to reduce the difference pressure sensor offset by let heat up the sensor and covering the Pitot-tube before the ground calibration. An offset drift of a few Pascals is common for this type of consumer grade sensors.
Сan the ambient temperature affect the altitude readings if there is a GPS altitude hold?
Sometimes at a temperature of -3 C, when the plane is turned on, the altitude shows up to 200m +.
To explain it further:
The altitude is calculated on relative measurements of the actual air pressure. The barometric air pressure sensor is a absolute pressure sensor (against the difference pressure sensor used for the air speed calculations).
These semiconductor based barometric pressure sensors are by nature very temperature sensitive. The accuracy of the air pressure measurement dependents heavily on the quality of the temperature calibration of the sensor done by the manufacturer.
The effect what you see is based on the temperature change of the sensor (starting cold and warming up) due to electrical heat by the sensor and other components on te pcb.
To reduce any negative temperature side effect after powering up just let the flight controller soak in the temperature a bit before takeoff. The temps of the barometer will settle. The temperature of the barometer sensor shown in the telemetry data (Mission Planner → Status-tab) is a good indicator to get a better understanding what happens here. You can find the barometer temperature data in the flash-logs.
Normally with arming the autopilot will store the ground pressure. All heights calculations are relative to this barometric pressure (in the default case using the baro as first height source).