I had an ‘incident’ today which I’ve been able to diagnose to a blocked airspeed sensor due to the previous ‘incident’.
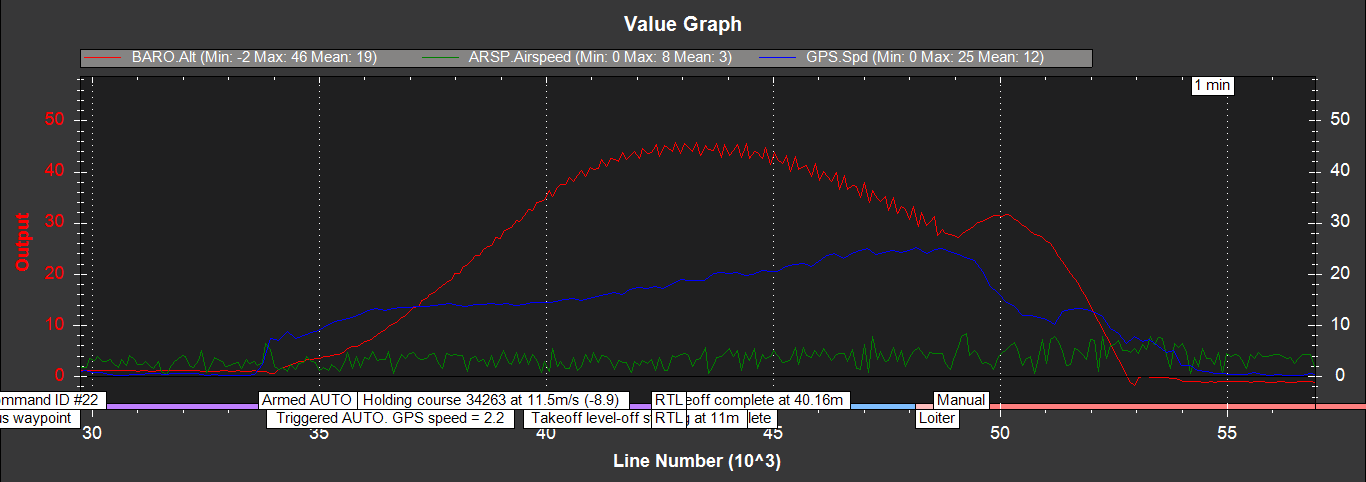
I had decided to try and setup auto-takeoff with my nano talon, so I could throw it and off it would go. First attempt failed with a nose-first landing, or pitot-tube first! After tweaking the climb rate, and ‘taping’ the front back together, the second launch went fine, until it completed the climb out and it began to violently porpoise with the elevator as it tried to get the airspeed up. Unfortunately by the time I realised what was going on, I couldn’t recover it.
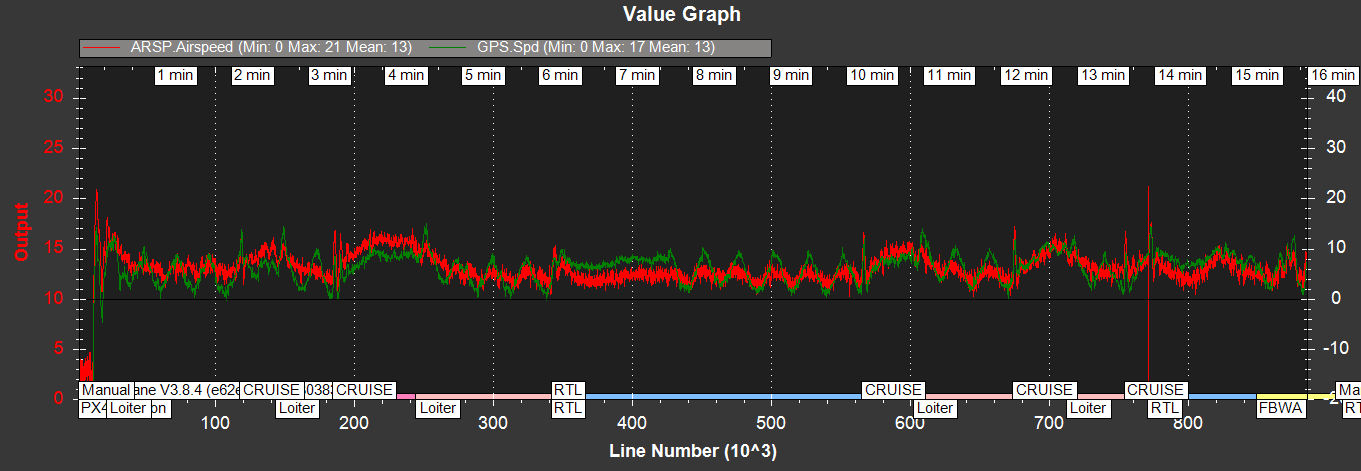
The log shows the airspeed never over 4m/s but the gps speed is far more realistic at about 15m/s.
Is there any logic/setting that would help it detect a failing airspeed and revert to GPS?
Unfortunately, there is no handling or detection of clogged airspeed ports, and if there were, you would not fall back to groundspeed, but cruise throttle.
Not having automatic detection and handling of this is dangerous if pilot fail to monitor the flight and diagnose the problem correctly, basically what happened to Air France 447…
Be sure to post your log here, with real data, it’s easier to add, and test logic that could prevent this in the future.
Since posting I took a look back thru the arduplane parameters and came across which sounds like it might have helped ?
AHRS_WIND_MAX: Maximum wind Note: This parameter is for advanced users
This sets the maximum allowable difference between ground speed and airspeed. This allows the plane to cope with a failing airspeed sensor. A value of zero means to use the airspeed as is.
As well as thw recent tragedy with Lion Air Flight 610 in Indonesia. What blows my mind are recent reports of air speed sensor failures on the last FOUR flights of this aircraft. I cannot believe it wasn’t grounded at the first sign of trouble.