Hi
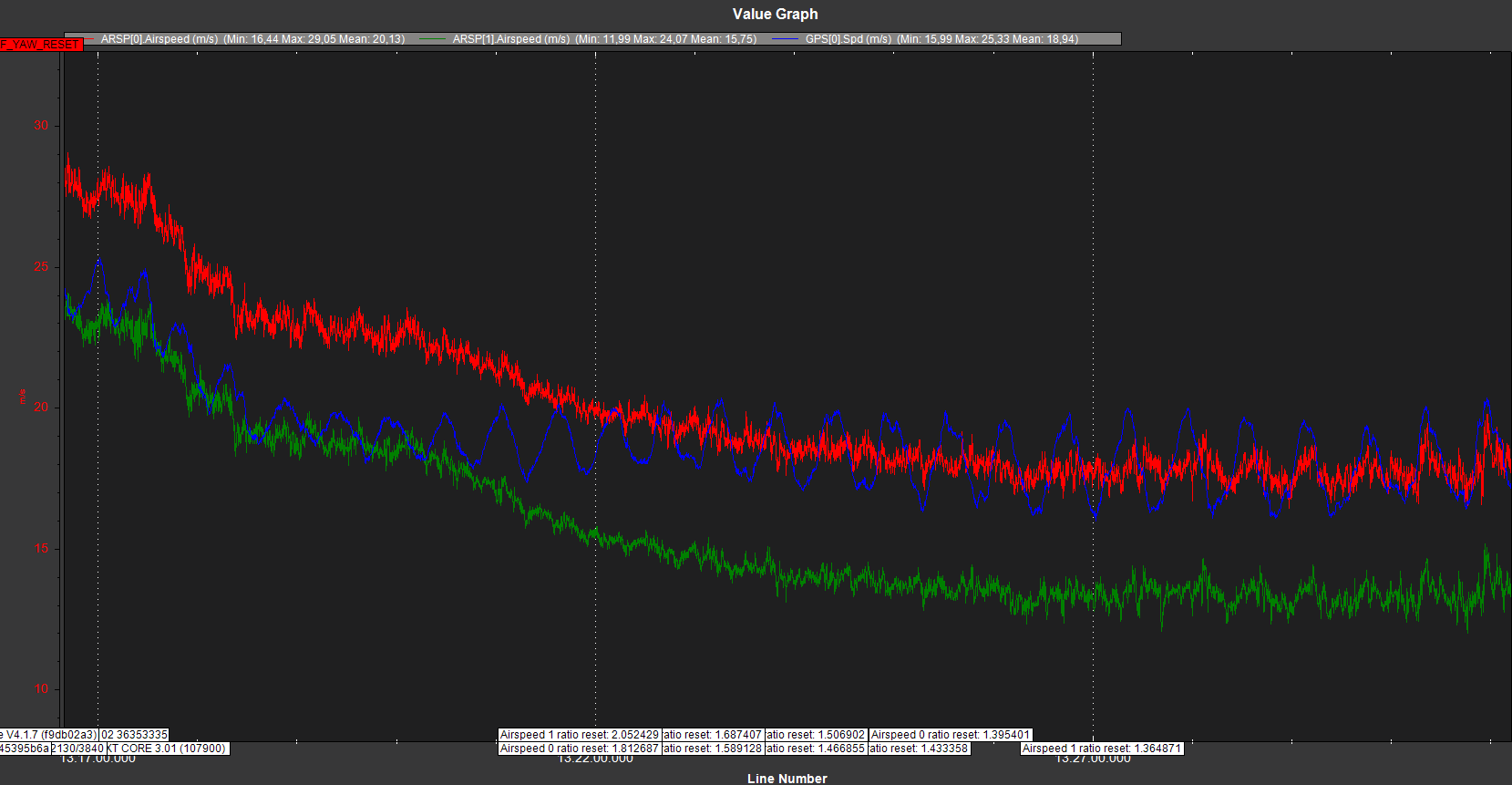
Attached screenshot from a flight where I tried to calibrate two airspeed sensors for use in a bigger VTOL project. ARSP0 (Red) is a 7250 I2C sensor - ARSP1 (Green) is a Matek DLVR-L10D UAVCan sensor. Gps speed is blue.
As you can see the Matek sensor ends up with a airspeed that is more than 4m/s too low. Why?
Is it possible that there is a mix-up in the calibration routine where numbers from airspeed0 is used to calculate new ratio for airspeed1?
Does the calibration routine only work for the airspeed0 sensor?
Should I avoid to try to calibrate two sensors at once?
Can not say why but it is apparent from the log that as red gets closer to blue, green deviates that much.
Maybe you could use the correctly calibrated airspeed ratio for dlvr sensor and return the matek one to the old one as you started the calibration because the green line tracks the blue line quite closely initially.