May I jump in here too.
I did some testing with MIX_MIN today in ACRO and experienced the same thing (I went up to MIX_MIN: 1.3). If I push throttle to min the quad is stable for a few seconds and than loses its stability like with MIX_MIN=0.1.
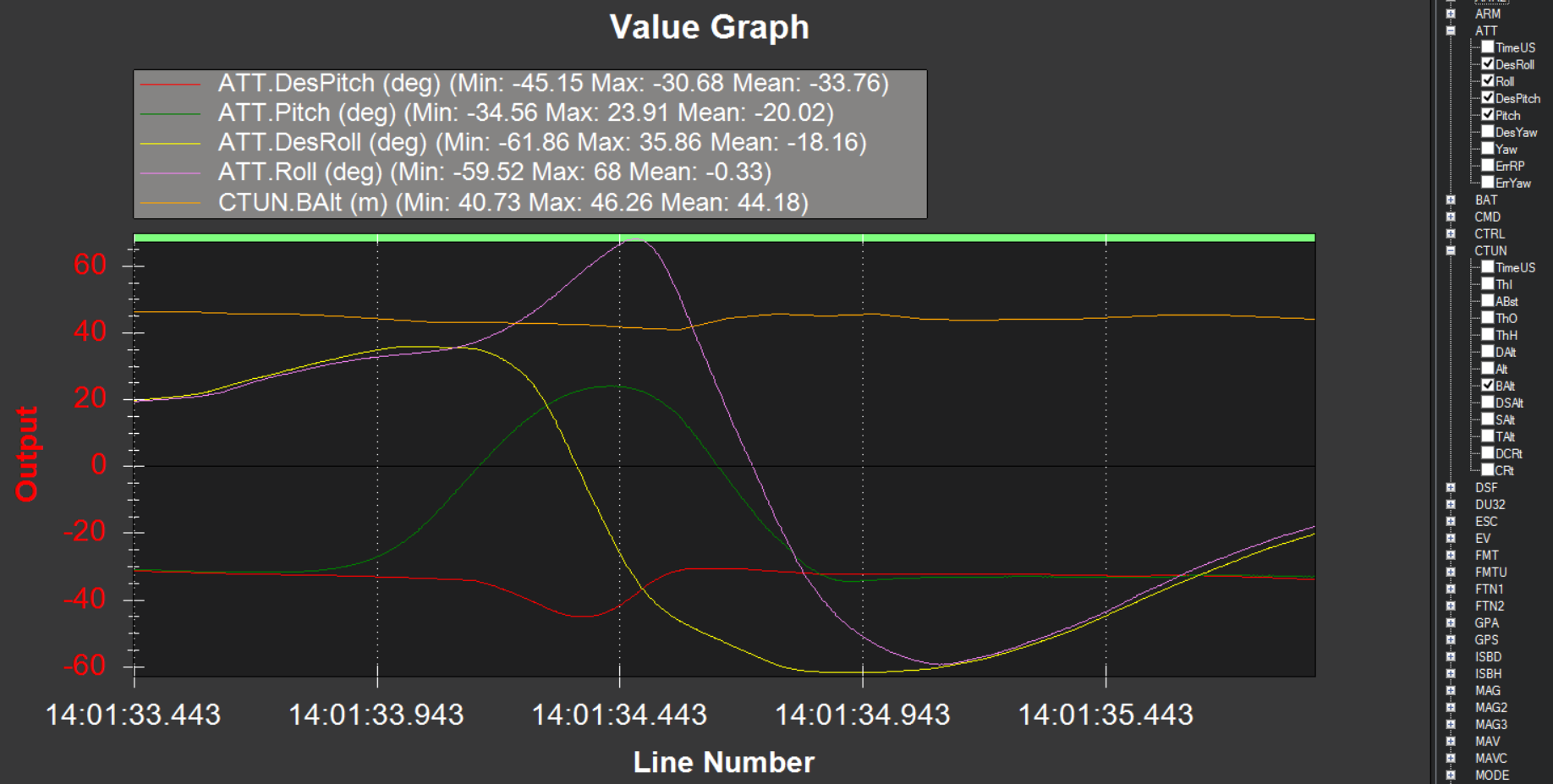
From racequads I am used to be able to cut throttle completely for as long as I like and the quad stays stable in the air what ever position it has. I added also the bin file if someone would like to look into it: https://www.swisstransfer.com/d/f54acb3f-8844-4276-b43c-0e8ae6e2f5a2(see pic).
They’re not really related. Also, the MOT_SPIN parameters are expressed as a fraction of maximum thrust (actually a fraction of configured PWM range), while the THR_MIX parameters are a fraction of hover throttle, so we can’t equate them like that anyways.
I made some tests.
With ATC_THR_MIX_MAN: 1.8 I had a similar feeling with throttle cut as with Kiss hardware. But once I tried a bit slow take off in ACRO the quad flipped up side down.
I than did a take off in Loiter and it flipped too.
Is MIX_MAN active in all modes?
It should only be active in manual modes - stabilise and acro. The flip is likely caused by stabilisation occurring while you are still in contact with the ground. This is why it’s important to take off quickly and when you come in to land better to have airmode disabled otherwise you will tend to bounce and flip. I enable airmode using ACRO_OPTIONS and that way I can land in stabilise.