Hi, I’ve searched some information about this specific sensor on the forums but haven’t found an specific topic for it.
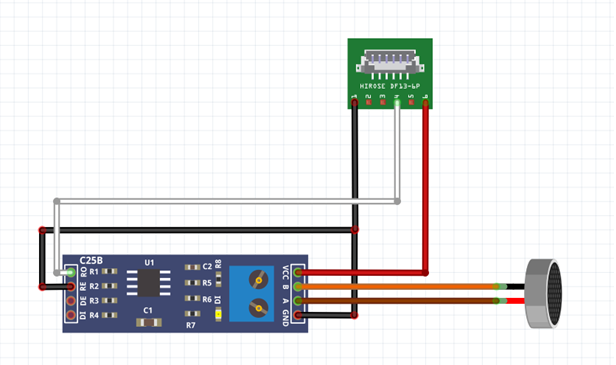
I’ve been working with it for about 5 months now, following the wiring diagram similar to the ECT400 (thanks a lot for the guide!) and it works nice connected to pixhawk using an RS485 converter.
What I’ve been struggling with has been all of the configurations parameters the transducer offers. I’m by no means and hydrographer or anything related and have made myself some basic questions, first of all:
How do I know the measured distance from the sensor is accurate enough?
I’ve just compared it using the simple “lead and line” method in some 6-12m deep water and the results were good. For this experiment I’ve used the standard sound of speed through water (SOSTW) @ 1500m/s , but this develops further questions like:
When do I have to change the SOSTW?
Can I trust a simple SOSTW chart based on temperature?
When do I have to adjust the RANGE option?
5.Should I use some sort of filtering while measuring or not?
6. Do I have to compensate the readings from the sensor with those from the IMU or are they neglectable?
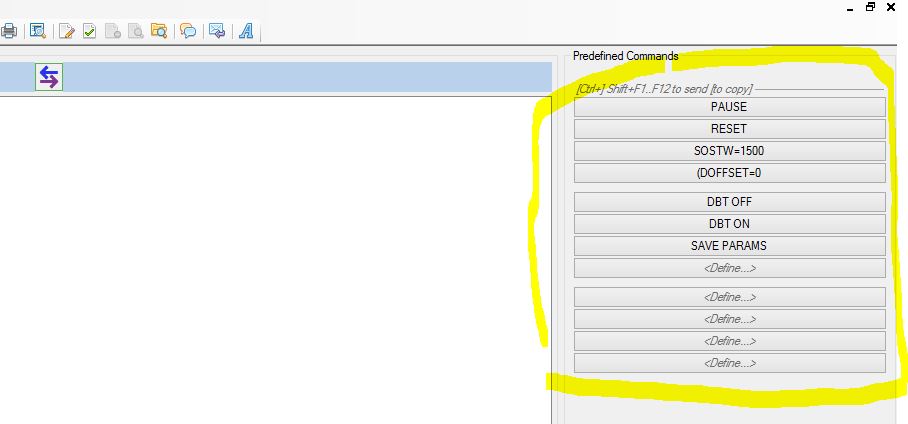
at the beginning I’ve found really difficult to set the parameters using just the COM port, but then I’ve found YAT which allows you to send predefined messages through the serial port and makes things easier.
Hi, take a look at my diagram below, (the buzzer like thing are NMEA A+ Out and NMEA B- Out) coming from the echosounder. Everything connected to a Max485 breakout board.
I have a program for changing the settings in the SS510 instead of a terminal (works on win 7).
I use the 422 output converted to 232.
as for f_quint’s questions:
bar check is the best option, lower a reflective plate to a known depth below transducer and check that the reading is the same (or close).
I never change the sound velocity in the transducer, post processing software corrects for that with a given SV profile.
best option is a Sound Velocity Profiler (SVP) that uses time-of-flight. but really, i depends on your accuracy needs and the waters characteristics (depth, temp change, salinity change, etc.).
best to change the RANGEDEFAULT in case of power outage, you can use auto but then there might inconsistencies when it changes range (i think the resolution is different in each mode).
I like to collect as much data as possible and filter in post, ping rate depends on depth.
Again, depends on the accuracy you want to achieve, i compensate at post if i have the data but it’s optional.
I know it’s a bit late to discuss this, but I’d like to know how you specifically send messages to the AIRMAR SS510. On my end, no matter how many messages I send, I don’t get any response back. It’s worth mentioning that I’m using the same software and communicating via the RS422 protocol. Here’s the converter I’m using.
Additionally, these are the messages I receive at the beginning when I connect the sensor and it starts up, and then the messages I receive when it’s measuring.
I’m not sure where I’m going wrong. On the converter side, I’ve swapped the cables, thinking the connection might be reversed, and on the software side, I’ve also configured the . However, when I try to send a message, I don’t get any response back. I’m using the message from the AIRMAR SS510 manual and I’m calculating the checksum with this website: https://www.meme.au/nmea-checksum.html in order to send the message.
Hi gsilva, I’ve been using this converter without problems: DBTech converter
However, I’ve also tested a few other RS485/422 converters that just weren’t able to comunicate with the echosounder, Just listened to the messages but wasn’t able to send parameters to it.
I would try with a easier parameter, just the $PAMTC,RESET to check out if it resets.
Hope this helps you.
Hi @gsilva, today I tested the same DBTech converter @f_quint mentioned connected just like yours and it worked straight away. I used the $PAMTC,RESET command to test.
Hi
I am using SS510 echo sounder connected with computer (window 10) through USG-2 serial gateway. Tried your software SS510-Terminal to adjust sound velocity and ping rate but did not get the desired result. Adjustment were made as per your instructions but there was no change in the data before and after adjustment. Moreover boxes on the right do not show any data.
Please guide accordingly and provide you have upgraded software
It seems like the data on the right is not there because it didn’t query successfully.
Did you pause the device’s output before querying ?
In the 2nd screenshot I can see that there is bad data coming in (either bad/incorrect connection on the gateway or conflict of NMEA sentences).
hitting the pause button sends a command, so if it doesn’t pause the output the device isn’t receiving data from the pc.
Yes I pause but kept on coming, then pressed query subsequently adjust sound velocity and draft, no change was observed
The echo sounder configures with Hypack and other software
Thanks for your quick response, it was configured according to your instruction. Echo Sounder receives data and configures with Hypack and other software. I will check the connection will share the outcome. Please confirm it is compatible with Window 10
According to your guidance the connections were checked and reconnected. Now it halts upon hitting pause. Pressing ‘SET’ and ‘QUERY’ reverse the sound velocity to the default value i.e. 1500 m/s and also depth offset is not applied. However temperature is applied. Please further guide to resolve the issue.