I’m in the process of tuning the Plane autopilot for FBWB and Loiter.
I have a custom-built electric glider, twin engine, 20 ft span. The goal is to do autonomous endurance flights.
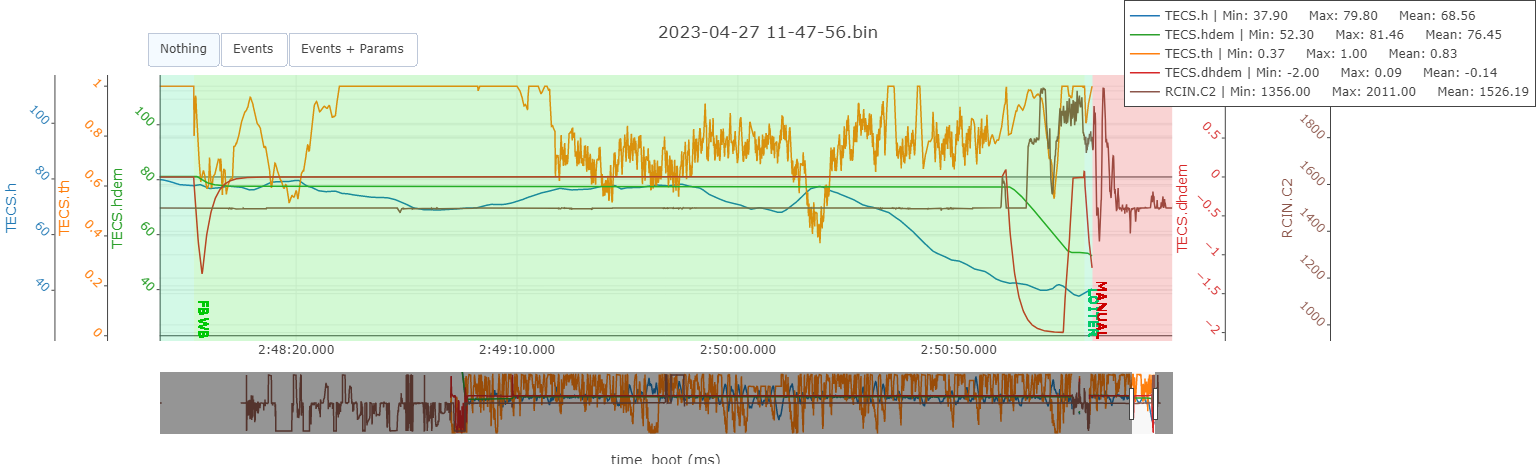
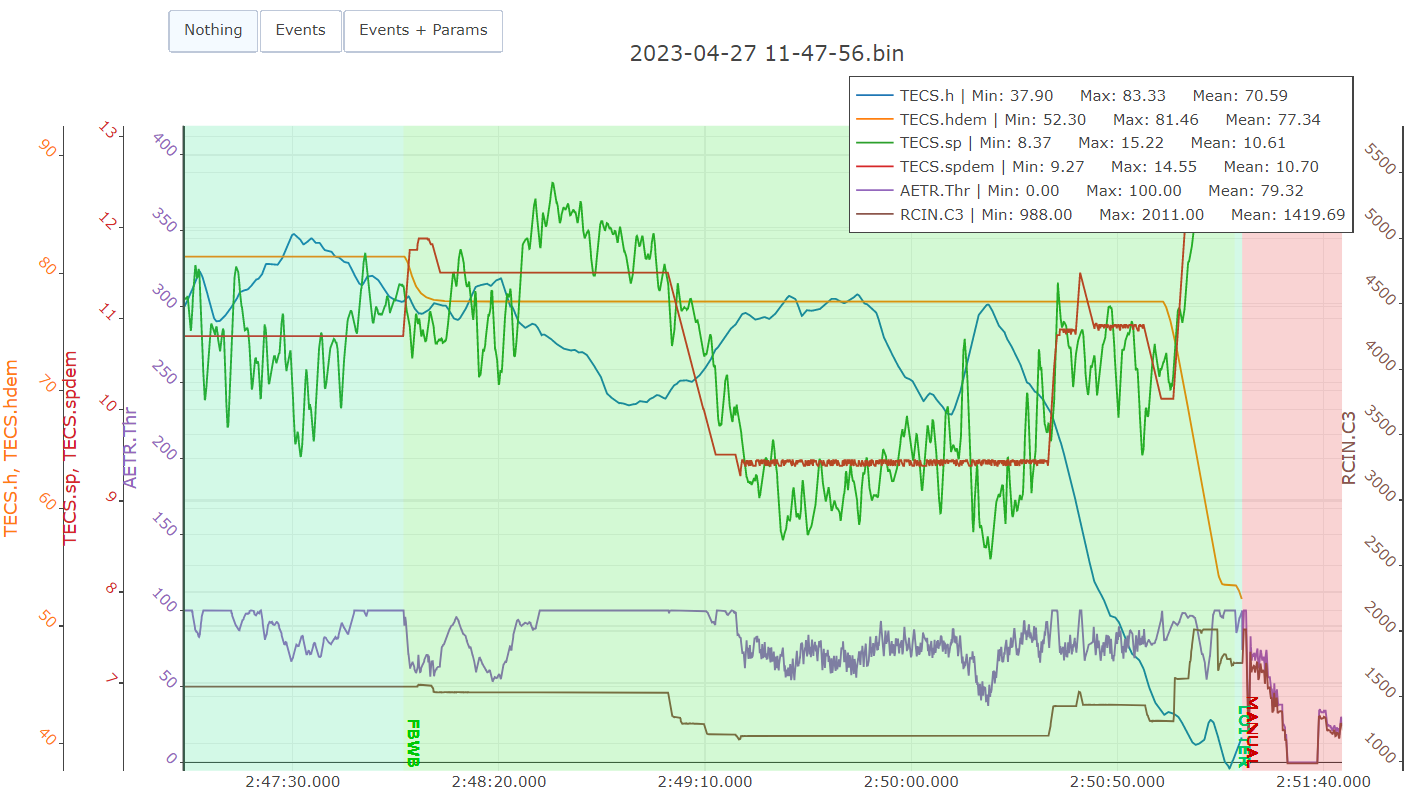
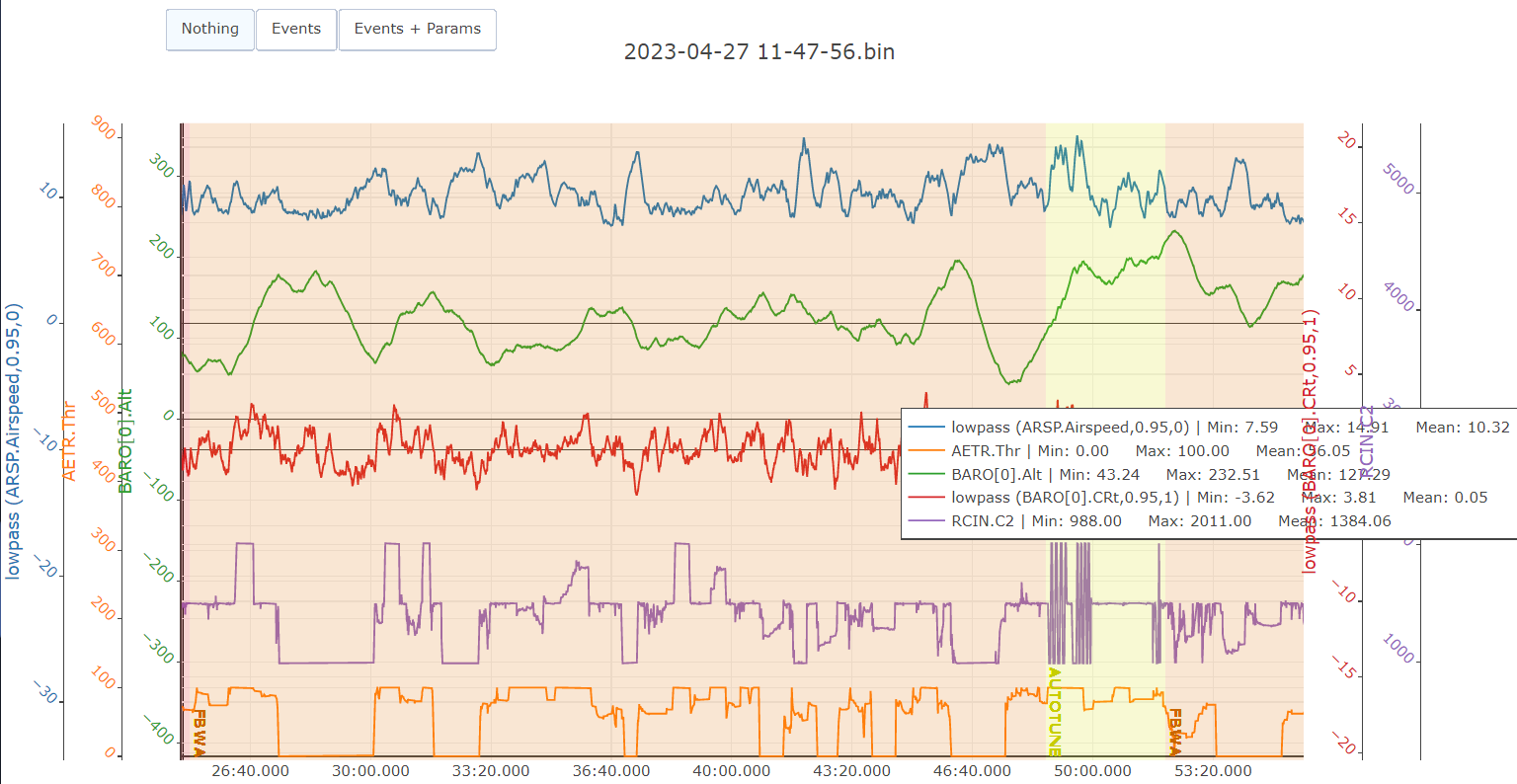
I went through the TECS tuning guide in FBWA and flew in Loiter for 1.5 h. Everything went fine. I then switched back to FBWB to do some straight legs at constant airspeed, which worked fine as well for a few legs, but then the aircraft suddenly started losing 40 m of altitude without any commanded input. When I then commanded max-climb rate, the aircraft did not respond. I switched to Manual and landed.
Does anyone have an idea what might be going on or where to look at?
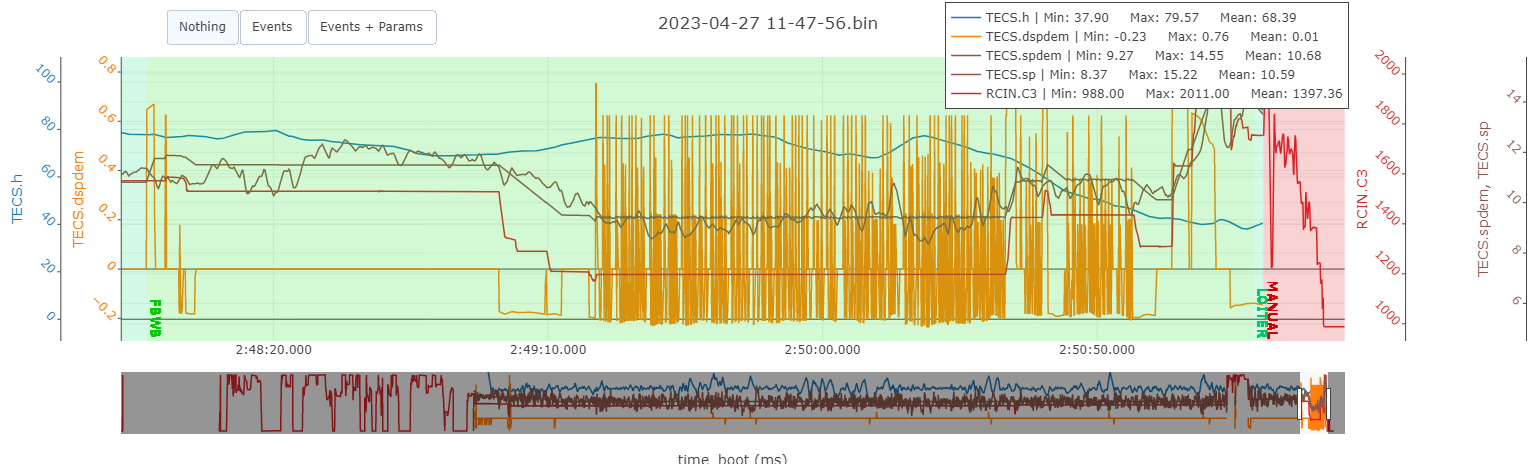
Looking at these records I find it difficult to draw conclusions. I can’t see level flight (maintained) at 8m/s and without touching the elevator.
There are many moments of throttle at zero and nose down but Throttle at zero and level flight (without touching the elevator) are practically not seen in the logs.
Personally I think that to get consistent data for TECS adjustment it is necessary to maintain the flight conditions sobre unos 8-10 segundos.
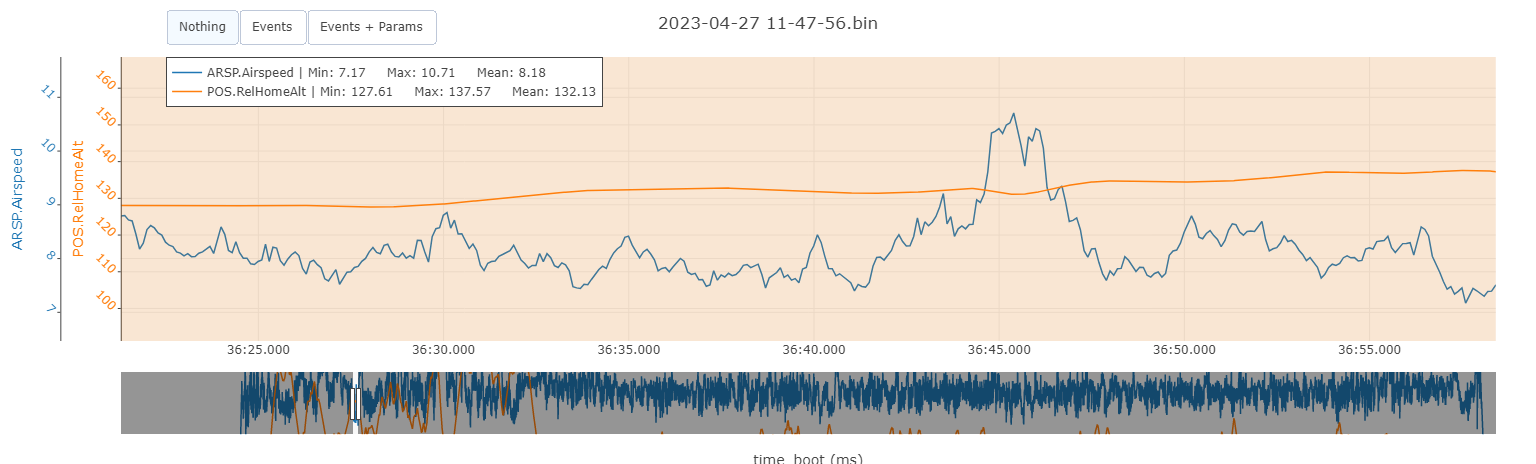
I had to push the nose down to stop it from climbing in FBWA. That’s because TRIM_PITCH_CD wasn’t tweaked yet. Here is 8 m/s level flight, the airframe is capable of that.