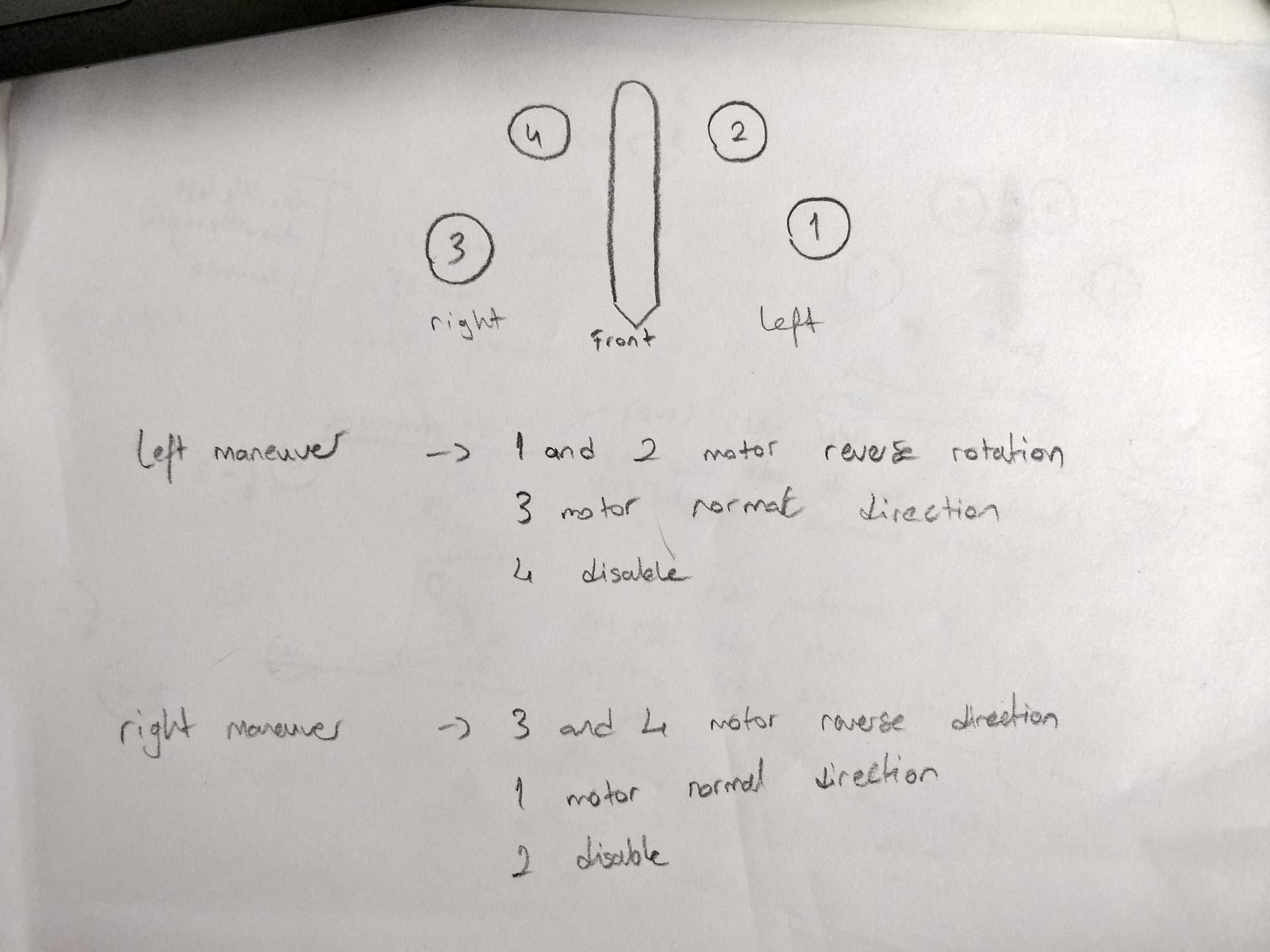
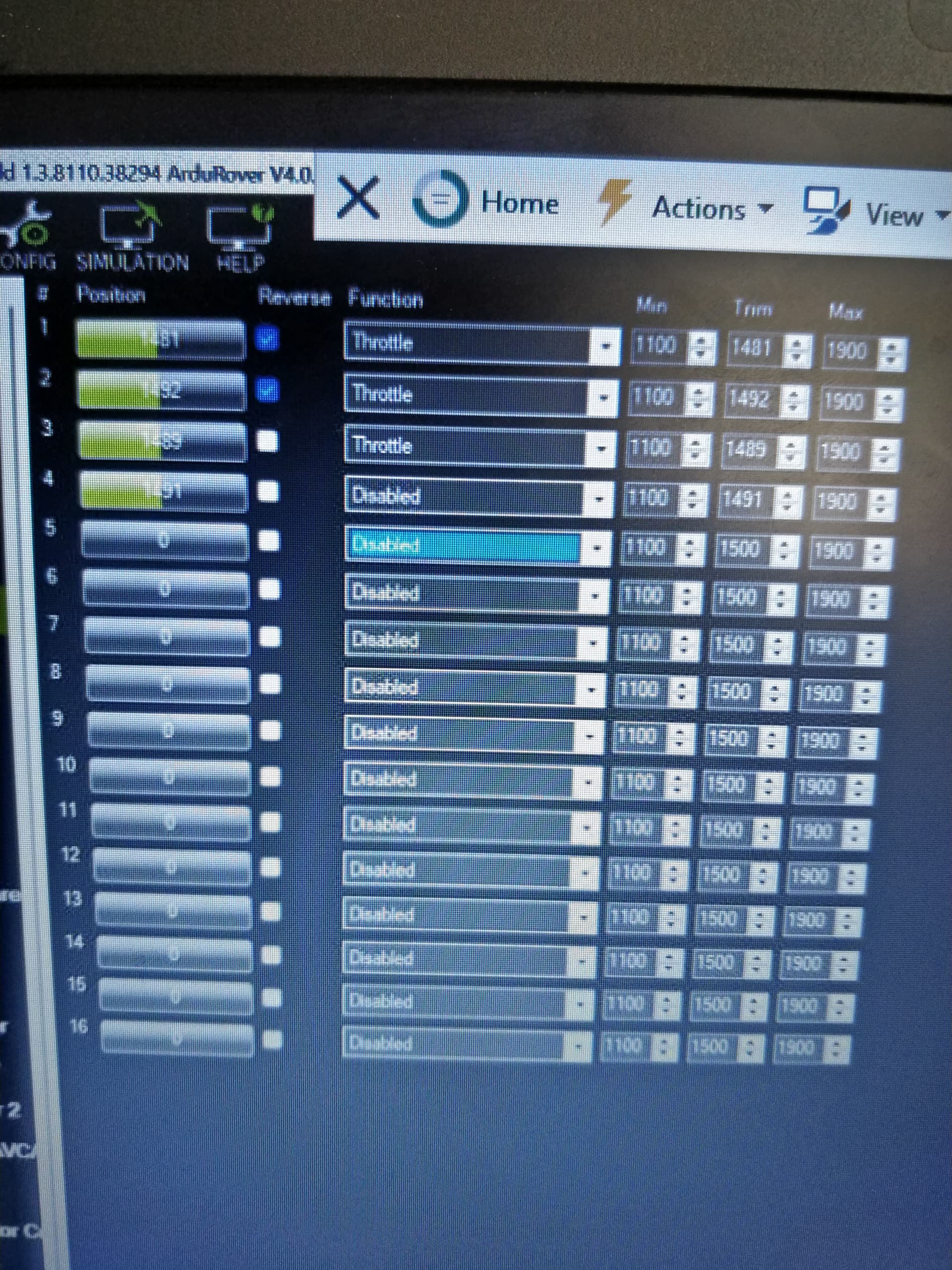
Hello. We built a boat which has 4 propellers. So propellers are both for maneuvering and throttling. But we have a problem. To turn the boat left side we have to run 3 propeller. You can understand from the picture. We just test the motors at motor test screen at 100 throttle. I setted all motors as throttle instead throttle left or right in servo output screen. So all motors were at the throttle and 1 motor was disable. To turn the left, we have to disable the number 4 and number 1 and 2 must be run in reverse direction. In this time, the boat maneuvering very well. When we want to maneuver the boat to the right-side, number 2 must be disable and 3-4 must be reverse direction. It is again successful. Without moving forward the boat is maneuvering very well at a spot. Now we have a problem. In servo output screen, how we can set this combination? The picture of servo output screen is for maneuvering to the left.
They need to be assigned as motors with a supported frame type which that isn’t one of. Check out Omni vehicles.
If I set them as motor, how missionplanner will understand that when we would like to maneuver to left, stop number 4 motor, number 3 normal direction and number 1 and 2 reverse direction?
Hi Gustavo, @Fringustavo
as I wrote in our PM conversation, you will have to use a lua script to get the motor mixing you want. I just took the time and wrote a lua script that should do what you need.
BUT I only tested it in SITL simulation. You will have to check all values and outputs I used in the script to match your actual vehicle.
The script uses “CONTROL_OUTPUT_YAW” to set the inner motors servo max value to trim (neutral). This stops one or the other motor during turns. I added a deadzone, so you can tweak the amount of steering needed to stop the motors.
The script reads in the actual SERVO2 and SERVO3 MAX/TRIM channel values and uses them.
You still need to match the script and vehicle outputs.
I did count from left to right. So output 1 would be the outer left motor, output 2 the inner left motor and so on.
The outputs will have to be set to throttle_left and throttle_right.
It would be great if anyone more knowledgeable than me could look at the script for any glaring errors…
trimaran.zip (880 Bytes)
Thank you so soooooo muchhhh. Excellent. I am trying to understand what should I do. You are really excellent. Thanks for everything. Mr @count74