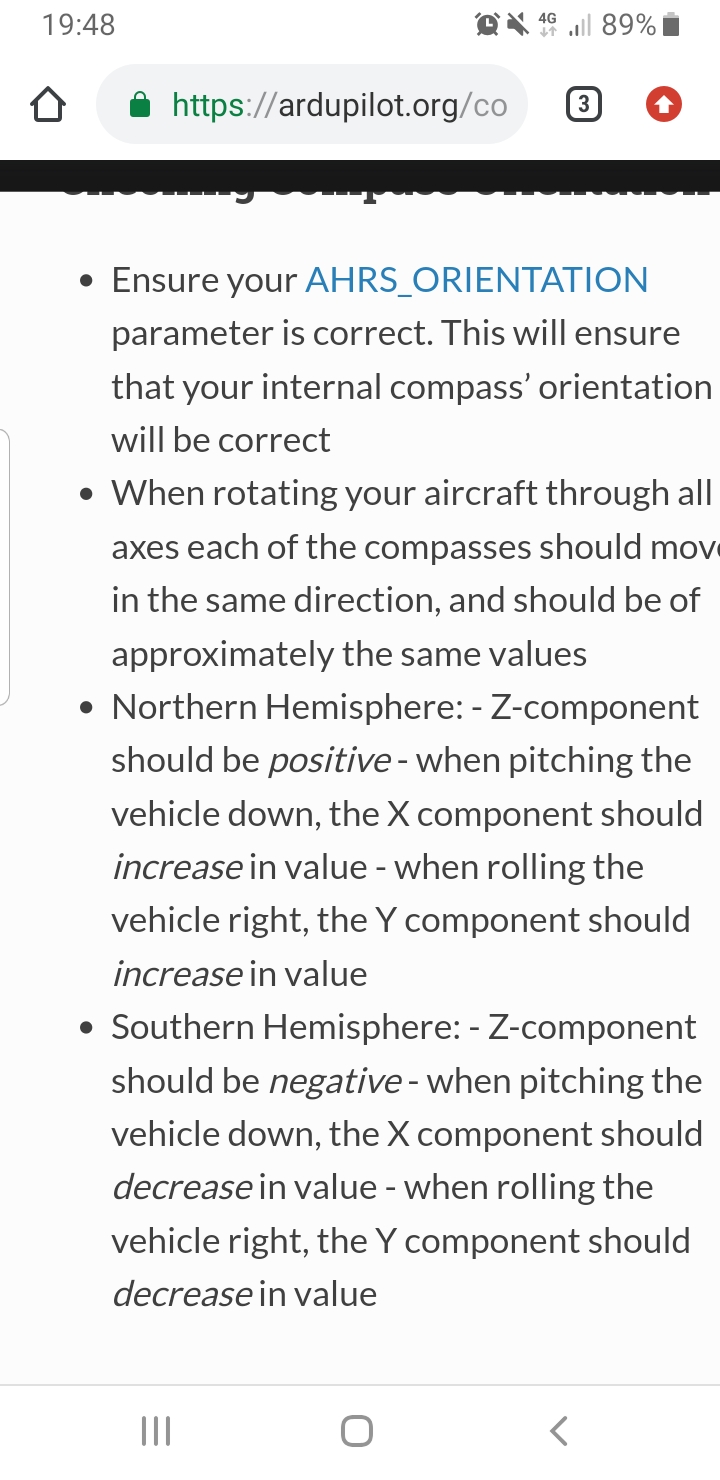
I’m after a little help setting up my flight controller for singlecopter.
My flight controller is pointing straight up AND it’s at 45 degrees to the flaps… So I essentially have an x flap configuration instead of +
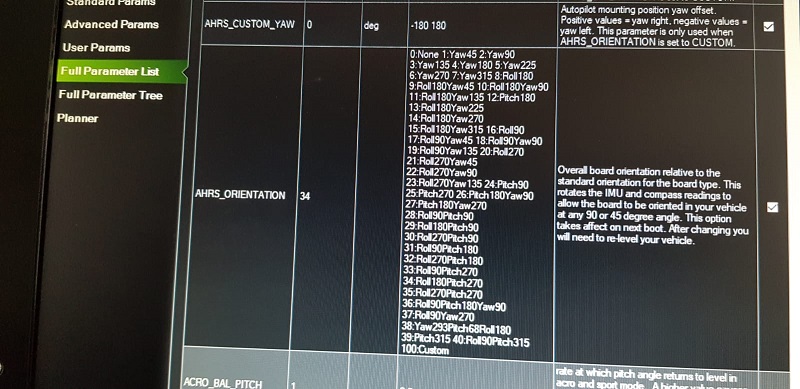
I assumed that I’d pick a number from the list on AHRS_ORIENTATION but I don’t see my combo on there… I need pitch 90(although the guide says 270), and yaw 45. Is that correct?
Thank you guys. I’ve found the three custom sliders and am currently trying to get it set right.
On some of the older systems, the compass has needed to be less than a few degrees of level to work correctly.
I have the GPS/GNSS antenna MCX, does that also have a compass as I can mount that in any direction and orientation.
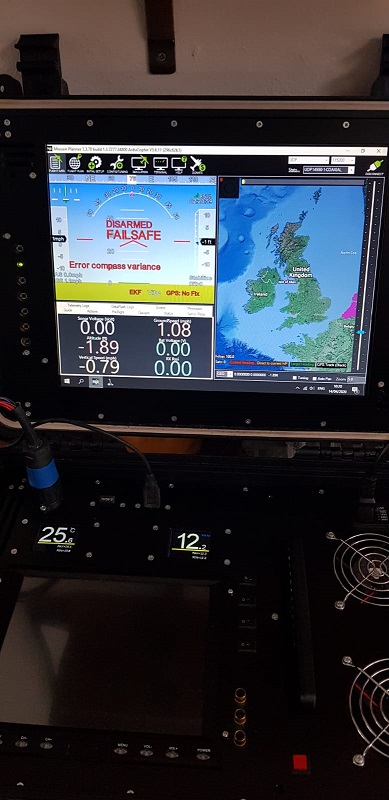
I’m worried that any onboard compass won’t work correctly with the board pointing up and the belly of it facing N/W.
If I set AHRS_ORIENTATION to 34, that is Roll 180 and Pitch 270(-90) then it sits perfectly with the board pointing downwards and the artificial horizon level.
However… If I set AHRS_ORIENTATION to 100 and AHRS_CUSTOM_PIT to -90 and AHRS_CUSTOM_ROLL to 180 with the board in exactly the same and un-move position, pitch is about +27 degrees and the roll is out by about 30.
AHRS_ORIENTATION set back to 34 (which is the same as above) and it goes back level.
It’s as if the custom settings don’t work. Which is a real pain because I need my board to be pointing down and at 45 degrees on the Y axis as it’s mounted on a hexagonal frame with a plus single copter fin configuration.
Have you had success calibrating this hardware in normal orientation just as a test?
I found the compass data output values on a ulbox m8n knock off, were incorrect. And the sensor outputs are as if the sensor was upside down, even when it was right way up.
Just an idea, if this isnt proven hardware that youve previously had running
I’ve disconnected the external GPS so it should just be using the Navio2 onboard stuff.
I’m trying to set AHRS_CUSTOM_PIT to 90… It goes +30 on the Hud… I deduct 30 from the -90 to -60 and it goes -30 on the Hud… I can’t even compensate for the offset that shouldn’t even be there in the first place.
My Pi3 B / Navio2 is point down to the floor, it’s sat on my desk strapped to a cube for easy accurate rotation yet I can not seem to get even the pitch and roll custom to work correctly.
I had real trouble understanding the outputs of the magnetometers, i ended up using qgc which gives more info. Then once i knew what the issue was i went back to mp
I used this info, and qgc which gives the live raw output data for each mag, (possibly mp does too, but i couldn’t find it) to work out what was going on.
Hi @LeeM I am watching here the same issue! When I try to use the Custom settigs he get out of level, but when I set it with AHRS_orientation its in level. worse is that with Custom settings I can go thorgh ACC/Gyro calibration but after it starts to give issues on gyro health. Have you suceeded with Custom orientation?
I am using the Traditional Heli stable version for the Matek H743.