Dear users,
I’m using Arduplane V4.0.2 in a Pixracer 15.
Yesterday during a CRUISE flight the plane suddenly lost altitude while at the same instant I saw the altitude reported by Mission Planner had grown by about 70 meters.
Fortunately there were no consequences having immediately taken manual control of the model.
Analyzing the logs at the time of the fact I see that GPS.alt and BARO.alt correctly report the altitude values during the bad moment, therefore the cause must be sought elsewhere.
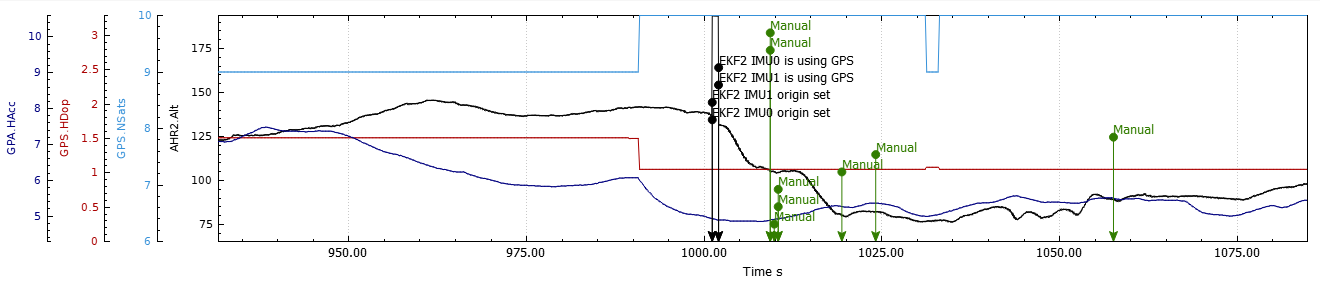
In particular AHR2.alt at the moment of the problem detects a short glitch of considerable amplitude; being just a glitch it normalizes after a fraction of a second.
However the value POS.alt and NTUN.AltErr remain largely erroneous in for 4 seconds.
Here is a the log https://easyupload.io/6pl9py and the bad moment is at 14:11:12.498
I would be very grateful if anyone could take a look at the log at that time.
Yes, I normally force arm but only when GPS ground speed reveal the airplane is slightly moving while in effect is not, so I don’t think there should be any relation with the fact hopefully
Your GPS is not performing very well; you took off with only 7 satellites, and the EKF wasn’t happy till you had 10. If you plan to use any position controlled mode, you should definitely not force arming before you see the message “EKFn is using GPS”.
Perhaps your GPS is getting interference from an onboard video or telemetry transmitter?
Dear Mark,
thanks for your analysis, much appreciated.
GPS is not the best but I think it is more correct to say that I will have to take care to wait and arm in a clean way.