I could be mistaking that it was in stabilise (I tried both) but I certainly did not cut the throttle. Is this not the safety system cutting the throttle after the crash?
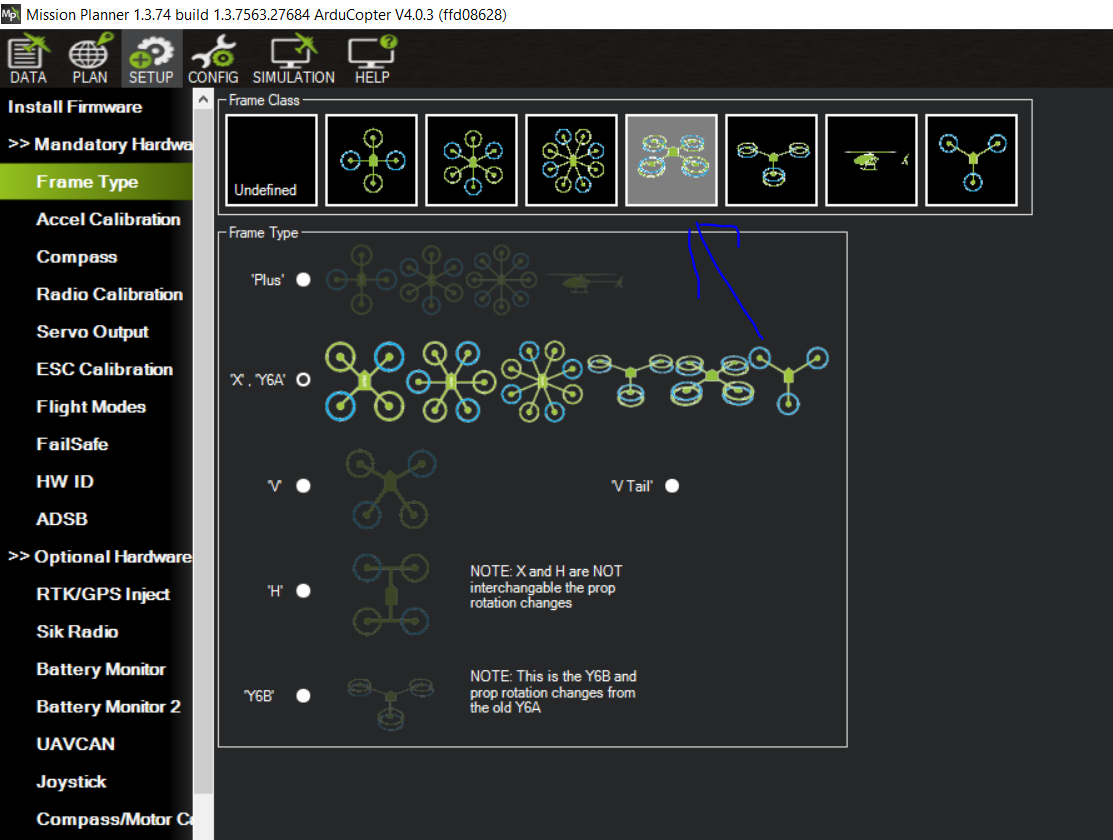
I think you are right! The logo in mission planner is not so clear. I connected to Q ground control and could see the Oxtaquad selection, I will change it and try to launch.
I do not think it is massively overpowered. I use an 8000mAh battery and a gimbal with a Sony RX-100 (not mounted while testing).
I have calibrated the radio for smooth throttle reaction, this is even on the low side in order not to ascend too fast.
It has been flying for years without problems.
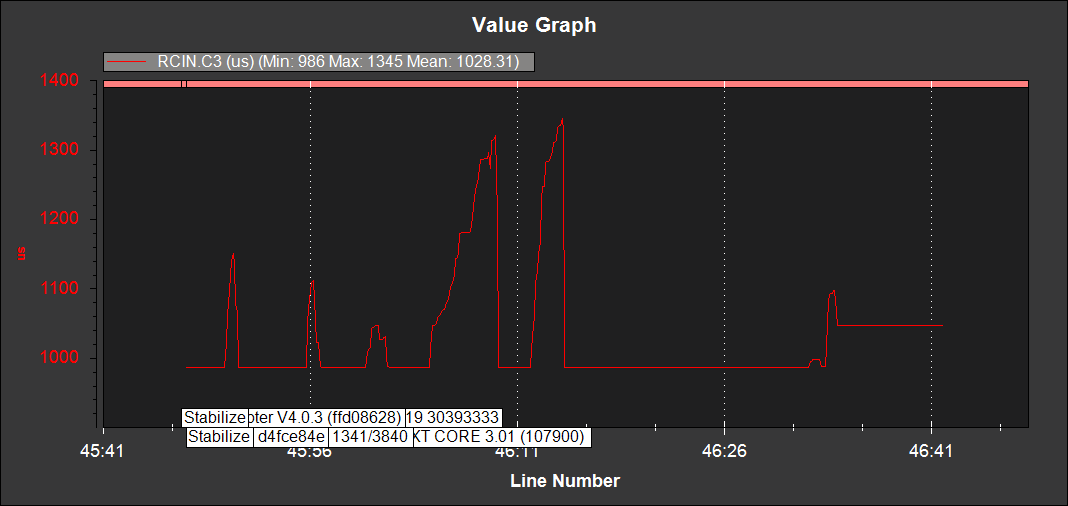
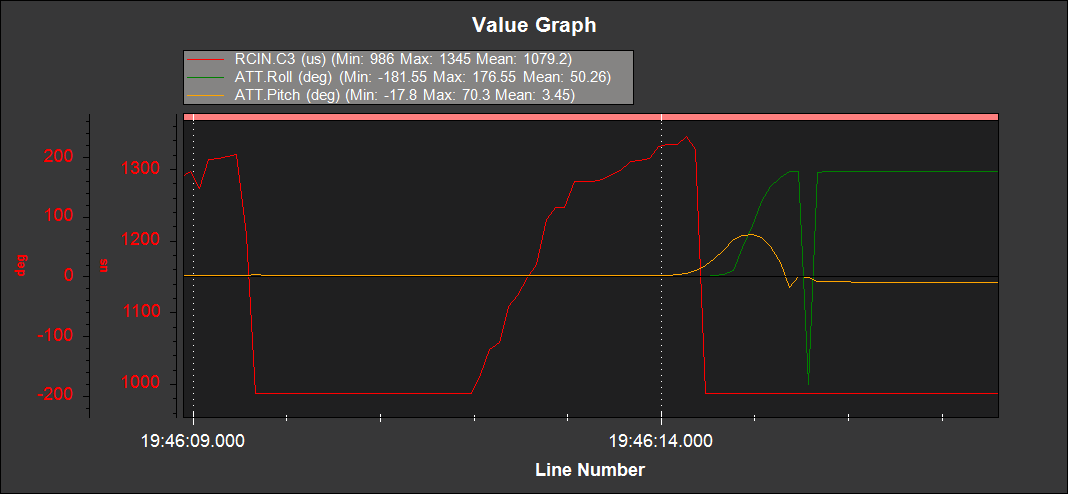
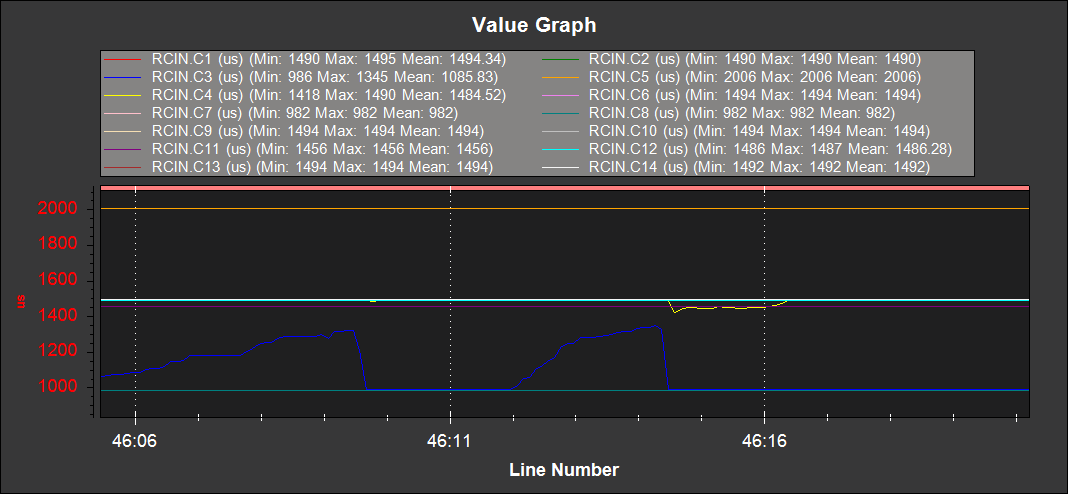
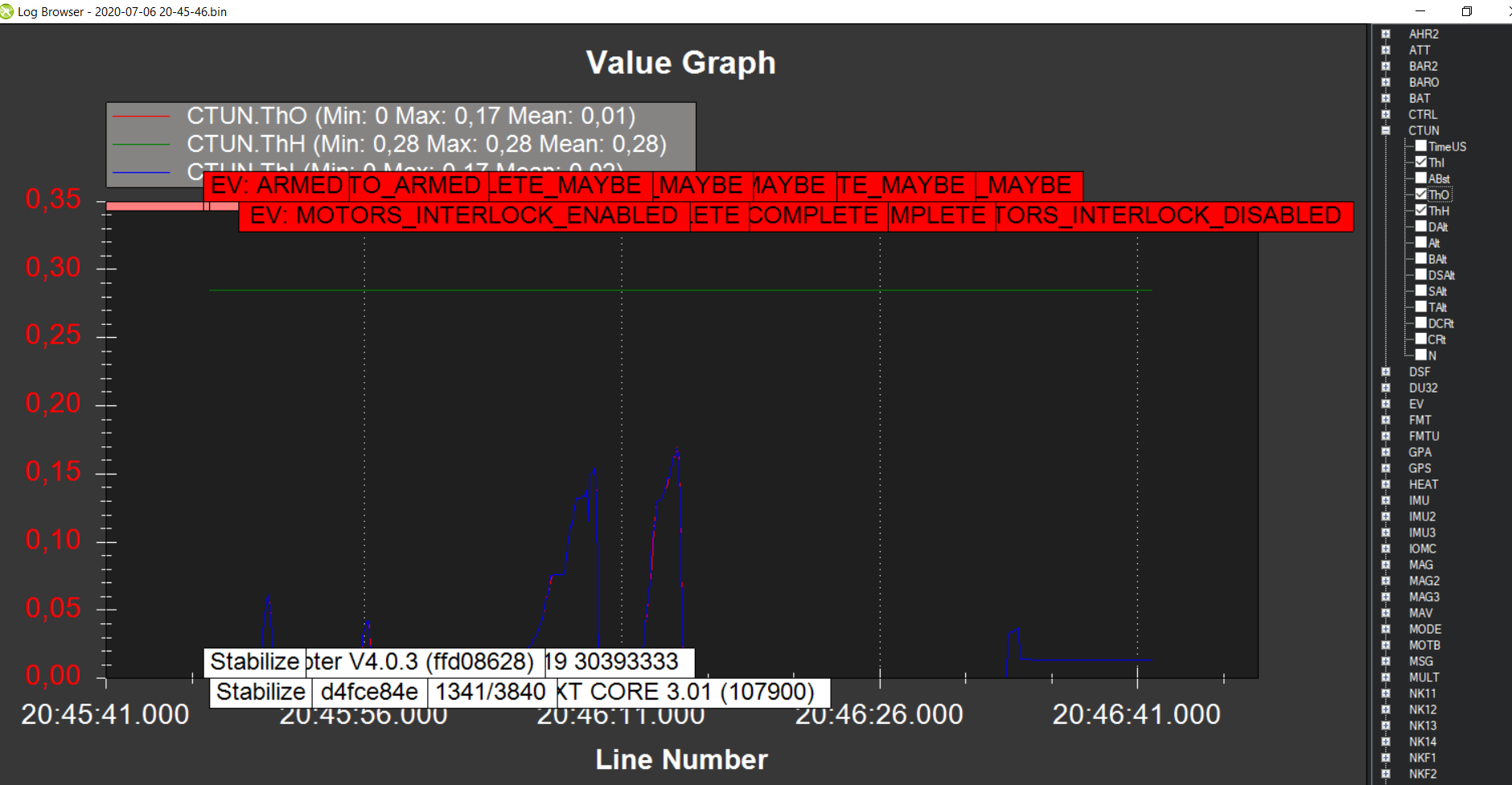
This is the CTUN data, I do not understand what this means, can you see anything wrong?
CTUN (Control, Throttle and altitude information):
FIELD
DESCRIPTION
TimeUS
Time stamp for messages in microseconds (can be ignored)
ThI
The pilot’s throttle in as a number from 0 to 1000
ABst
Angle Boost: throttle increase (from 0 ~ 1000) as a result of the copter leaning over (automatically added to all pilot and autopilot throttle to reduce altitude loss while leaning)
ThO
Final throttle output sent to the motors (from 0 ~ 1000). Normally equal to ThrI+ABst while in stabilize mode.
ThH
Estimated throttle required to hover throttle in the range 0 ~ 1
DAlt
The Desired Altitude while in AltHold, Loiter, RTL or Auto flight modes. It is influenced by EKF origin, which in 3.5.X is corrected by GPS altitude. This is behaviour is turned off in 3.6.X and can be turned on with EKF_OGN_HGT_MASK.
Alt
The current EKF Altitude
BAlt
Barometer Altitude: The altitude above ground according to the barometer
DSAlt
Desired distance in cm from ground or ceiling (only visible if Sonar is available)
SAlt
Sonar Altitude: the altitude above ground according to the sonar (Only visible of Sonar is available)
TAlt
Terrain altitude (not used by default)
DCRt
Desired Climb Rate in cm/s
CRt
Climb Rate in cm/s
N
Harmonic notch current center frequency for gyro in Hz