The firmware version of flight controller is 4.2.3.
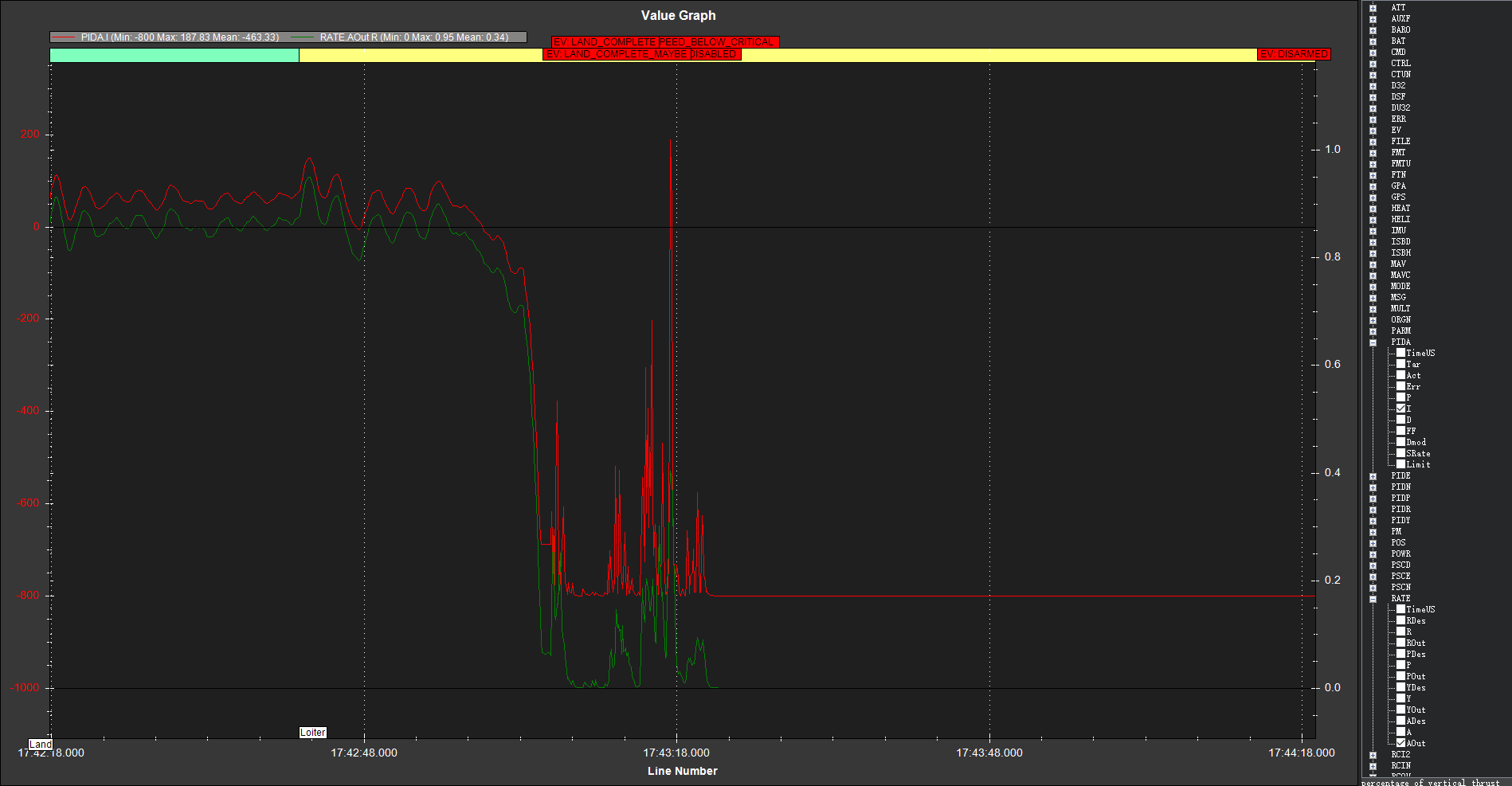
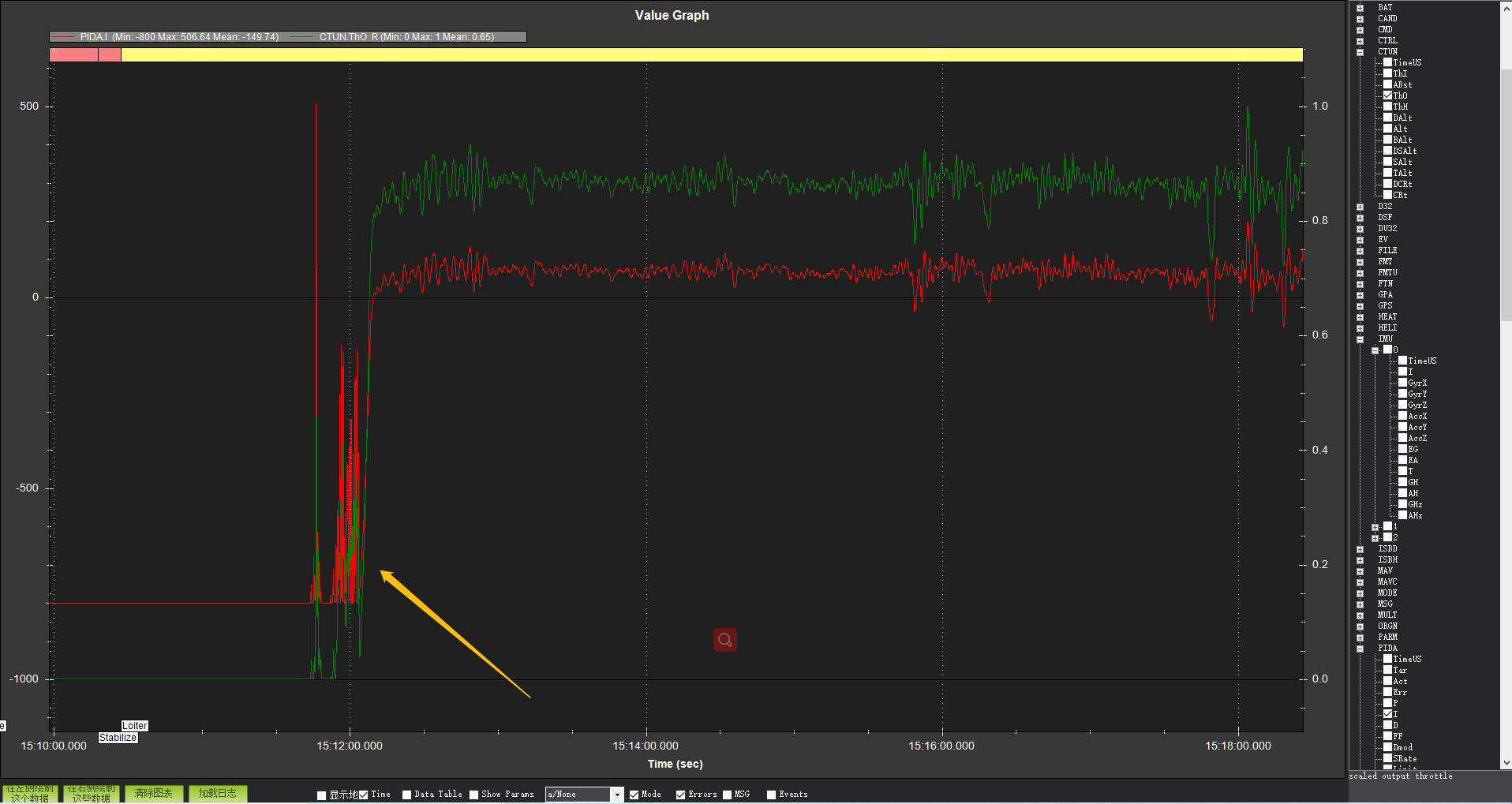
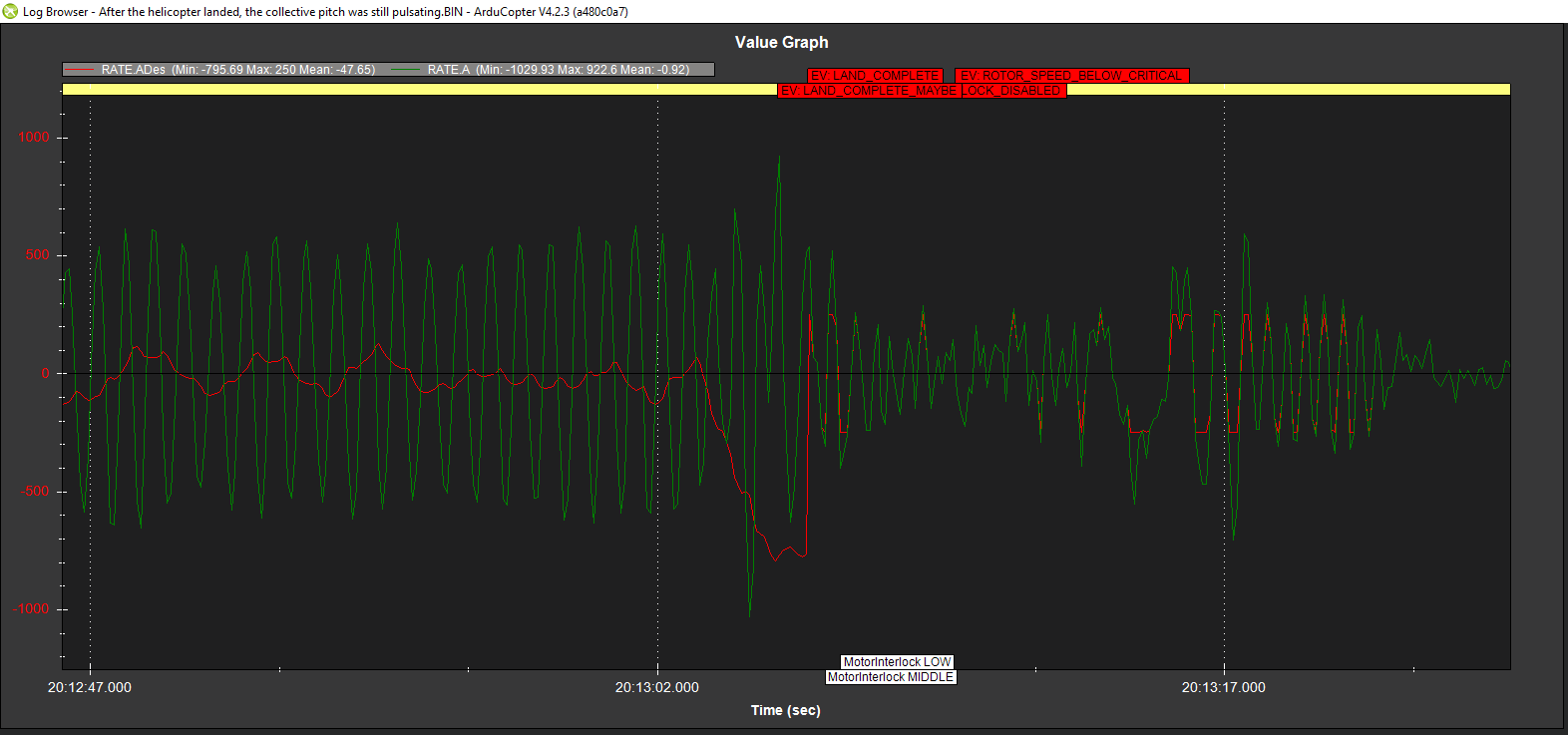
After the helicopter lands, the integral control items of roll and pitch remain zero, but the integral control of altitude control still fluctuates and does not remain unchanged to the minimum, which leads to the collective pitch still jumping and even causes the helicopter to jump.
Is it possible to keep the integral term of altitude control unchanged as the minimum value after landing, so as to prevent the helicopter from jumping on the ground?
OK, and we will get the new log data as soon as you suggest.
Yes, this vibration is really big, and it gives us a lot of trouble. But it’s very hard to reduce the vibration of this oil-powered helicopter, it’s a very good effort.
Yes, your advice was critical and made a big difference. We’ve made the INS_ACCEL_FILTER a lot smaller, but I’m worried that if this is too small, it will affect the response speed of the helicopter.
When the helicopter is on the ground, the integral terms for roll and pitch control remain zero, but I don’t understand why the integral terms for altitude control are not constant at the lowest point, but jumping constantly.
Your acceleration noise or vibration is 2x your maximum. When on the ground exceeds your maximum and this is why you see the problem. With the faster logging I may be able to get an idea where this is coming from. It may be a higher frequency signal that looks like a low frequency signal due to the slow sample rate.
The VIBE message shows higher frequencies that are difficult to see in the controller logging. Your vibrations appear to be lower in frequency and dominate your controller logging. Due to the low update rate of this logging it is hard to know exactly what the frequency is.
And the key part of my advice is below:
This is being done in the height control, but we also need to restrict the values to the maximum you allow the autopilot to use. Your frame vibration noise is higher than these maximum values.
The real solution is to remove the 1g vibration that you are constantly feeding to the autopilot.